モデルの一部を線形化するよう指定
モデル内のサブシステム、ループ、またはブロックを線形化するには、"解析ポイント" を使用します。モデルで定義した各解析ポイントは、以下の目的を 1 つ以上果たします。
入力 — ある解析ポイントに、加法的入力信号がソフトウェアによって与えられます。たとえば、プラント入力における外乱をモデル化するためにこれを行います。
出力 — あるポイントにおける信号の値がソフトウェアによって測定されます。たとえば、プラント出力における外乱の影響を調べるためにこれを行います。
ループ開始点 — あるポイントにおける信号の流れの中断がソフトウェアによって解釈されます。たとえば、プラント入力における開ループ応答を調べるためにこれを行います。
システムの一部に対して線形モデルを計算するには、モデルの線形化対象部分の入力信号と出力信号に線形化の入力ポイントおよび出力ポイントを指定します。開ループ応答を計算するには、信号の流れを中断するループ開始点を指定します。複数の入力ポイントと出力ポイントを定義して MIMO 線形化モデルを計算することもできます。
解析ポイント
Simulink® Control Design™ ソフトウェアを使用して、次のタイプの線形解析ポイントを指定できます。これらの解析ポイントは純粋な注釈であり、モデルのシミュレーションには影響を与えません。
| 解析ポイント | 説明 |
|---|---|
入力の摂動
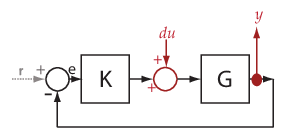
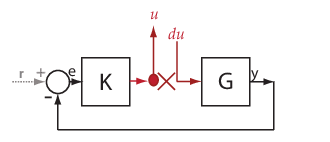
| 信号への加法的入力を指定します。 線形化されたシステムの伝達関数を定義するには、入力の摂動を出力の測定または開ループの出力とともに使用します。 たとえば、サンプル システムの応答 G/(1+GK) を計算するには、入力の摂動 du と出力の測定 y をここに示すように指定します。
|
出力の測定
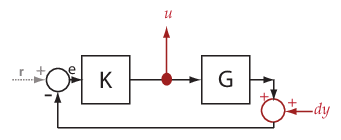
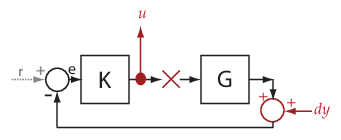
| 信号での測定値を取得します。 線形化されたシステムの伝達関数を定義するには、出力の測定を入力の摂動または開ループの入力とともに使用します。 たとえば、サンプル システムの応答 -K/(1+KG) を計算するには、出力の測定点 u と入力の摂動 dy をここに示すように指定します。
|
ループの中断
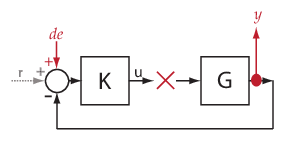
| ループ開始点を指定します。 ループの中断は、ループ付近での開ループ伝達関数を計算するために使用します。通常、入れ子にされたループがある場合や、一部のループの影響を無視する場合にループの中断を使用します。 サンプル システムでは、ループの中断が u で信号の流れを停止します。その結果、入力の摂動 de から出力の測定 y への伝達関数は 0 になります。
|
開ループの入力
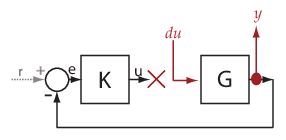
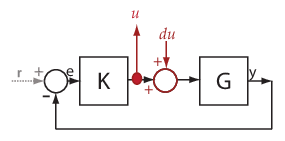
| ループの中断と、その後に続く入力の摂動を指定します。 プラントまたはコントローラーを線形化するには、開ループの入力を出力の測定または開ループの出力とともに使用します。 たとえば、サンプル システムのプラントを線形化するには、ここに示すように G の前に開ループの入力を、G の後に出力の測定 y をそれぞれ追加します。開ループの入力は u で信号の流れを中断し、入力の摂動 du を追加します。
|
開ループの出力
| 出力の測定と、その後に続くループの中断を指定します。 プラントまたはコントローラーを線形化するには、開ループの出力を入力の摂動または開ループの入力とともに使用します。 たとえば、サンプル システムの応答 -K を計算するには、ここに示すように K の後に開ループの出力を、G の後に入力の摂動 dy をそれぞれ追加します。開ループの出力は信号の流れを中断し、出力の測定 u を追加します。
|
ループ伝達関数
| ループの中断の前に出力の測定を指定し、それらの後に続く入力の摂動を指定します。 ループ付近での開ループ伝達関数を計算するには、ループ伝達の解析ポイントを使用します。 たとえば、サンプル システムの -KG を計算するには、ループ伝達の解析ポイントを、ここに示すように指定します。ソフトウェアは出力の測定 u を追加して信号の流れを中断し、入力の摂動 du を追加します。
|
感度関数
| 入力の摂動と、その後に続く出力の測定を指定します。 感度関数は、追加された外乱に対する信号の感度を測ります。感度は閉ループ測定です。開ループ ゲインが たとえば、サンプル システムのプラント入力における感度を計算するには、ここに示すように感度関数の解析ポイントを追加します。ソフトウェアは、入力の摂動 du と、その後に続く出力の測定 u を追加します。du から u への閉ループ伝達関数は 1/(1+KG) です。
|
相補感度関数
| 出力の測定と、その後に続く入力の摂動を指定します。 ある点での相補感度関数とは、その点での加法的な外乱から同じ点での測定への伝達関数のことです。感度関数とは対照的に、測定の後に外乱が追加されます。この解析ポイントを使用して、ループ付近での閉ループ伝達関数を計算します。 たとえば、サンプル システムの閉ループ伝達関数を計算するには、ここに示すように相補感度関数の解析ポイントを追加します。ソフトウェアは、出力の測定 u と、その後に続く入力の摂動 du を追加します。du から u への閉ループ伝達関数は -KG/(1+KG) です。
|

フィードバック ループを開く
モデルに 1 つ以上のフィードバック ループが含まれている場合は、開ループまたは閉ループ システムを線形化できます。
フィードバック ループの影響を除去するには、解析ポイントを使用することで、信号線を手動で中断することなくループ開始点を挿入できます。非線形モデルから手動でフィードバック信号を削除した場合、モデルの操作点が変更され、異なる線形化モデルが作成されます。詳細については、ソフトウェアでループ開始点を処理する方法を参照してください。
必要な線形モデルを取得するには、ループ開始点を適切に配置することが重要です。開ループ解析と閉ループ解析の違いを理解するために、次の単一ループ制御システムについて考えてみましょう。

モデルの平衡操作点に関してプラント P を線形化すると仮定します。
プラントのみを線形化するには、ブロック P の出力でループを開きます。ループを開かない場合、U と Y の間の線形化モデルはフィードバック ループの影響を含みます。
| Y でループを開く | U から Y への伝達関数 |
|---|---|
| はい |
|
| いいえ |
|
ループ開始点は、線形化の入力または出力ポイントと同じ場所になくても構いません。たとえば、次のシステムでは外側のフィードバック ループのゲインの後にループ開始点があります。このように配置することで、線形化からこのループの影響が取り除かれます。その結果、線形化パス上にあるのは青いブロックのみとなります。

この例では、線形化の出力ポイントと同じ位置にループ開始点を配置すると、内側のループの影響も線形化の結果から除去されます。
モデルの一部を線形化する指定方法
モデル内で、線形解析ポイントを使用して線形化の対象部分を定義するにはいくつかの方法があります。これらの方法はそれぞれ独自の利点があり、使用する線形化ツールによって異なります。線形化ツールの選択の詳細については、線形化ツールの選択を参照してください。
| モデル部分の指定方法 | 方法の選択基準 | 詳細情報の参照先 |
|---|---|---|
| Simulink モデル内 | 解析ポイントをモデルに直接保存する場合や、解析ポイントをモデル内にグラフィカルに表示する場合。 | Simulink モデルでモデルの一部を線形化する指定 |
| モデル線形化器の使用 | モデル線形化器を使用して、Simulink モデルを変更せずに、モデルを対話的に線形化する場合。この方法ではモデルに開ループまたは閉ループの伝達関数を複数指定できます。 | モデル線形化器でモデルの一部を線形化する指定 |
コマンド ラインで linio コマンドを使用 | linearize コマンドを使用してモデルを線形化する場合。linio を使用しても Simulink モデルは変更されません。 | コマンド ラインを使用したモデルの一部の線形化の指定 |
slLinearizer インターフェイスを使用 | モデルを再コンパイルせずに線形化されたシステムから開ループまたは閉ループの伝達関数を複数取得する場合。この方法を使用しても Simulink モデルは変更されません。 | バッチ線形化用に対象の信号をマークする |
slTuner インターフェイスを使用 | モデルを再コンパイルせずに調整された制御システムから開ループまたは閉ループの伝達関数を複数取得する場合。この方法を使用しても Simulink モデルは変更されません。 | 制御システムの解析と設計における対象信号のマーク |
| 特定のブロックまたはサブシステムとして | ブロックのすべての入力および出力に解析ポイントを定義せずに特定のブロックまたはサブシステムを線形化する場合。この方法を使用しても Simulink モデルは変更されません。 | プラントの線形化 |
参考
linio | linearize | slLinearizer | slTuner