getComponents
2-DOF PID コントローラーからの SISO 制御コンポーネントの抽出
説明
例
入力引数
分解対象の 2-DOF PID コントローラー。コントローラー オブジェクト pid2 または pidstd2 として指定します。
2-DOF コントローラーを分解するためのループ構造。'feedforward'、'feedback' または 'filter' として指定します。これらは、以下に述べる制御構造とアーキテクチャに対応しています。
'feedforward'—Cはエラー信号を入力とする通常の SISO PID コントローラーです。Xは次に示すフィードフォワード コントローラーです。
C2が連続時間の並列形式コントローラーである場合、コンポーネントは次の式で与えられます。次のコマンドは、フィードフォワード構成に合わせて r から y までの閉ループ システムを構成します。
T = G*(C+X)*feedback(1,G*C);
'feedback'—Cはエラー信号を入力とする通常の SISO PID コントローラーです。Xは、次に示すような y から u へのフィードバック コントローラーです。
C2が連続時間の並列形式コントローラーである場合、コンポーネントは次の式で与えられます。次のコマンドは、フィードバック構成に合わせて r から y までの閉ループ システムを構成します。
T = G*C*feedback(1,G*(C+X));
'filter'—Xは基準信号のプレフィルターです。Cは、次に示すような、フィルター処理された基準と出力との差を入力とする通常の SISO PID コントローラーです。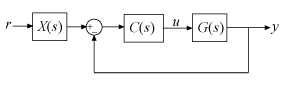
C2が連続時間の並列形式コントローラーである場合、コンポーネントは次の式で与えられます。次のコマンドは、フィルター構成に合わせて r から y までの閉ループ システムを構成します。
T = X*feedback(G*C,1);
上述の式は連続時間の並列形式コントローラーについてのものです。標準形式のコントローラーや離散時間のコントローラーは、類似の構成に分解できます。getComponents コマンドは、すべての 2-DOF PID コントローラー オブジェクトで機能します。
出力引数
バージョン履歴
R2015b で導入