make2DOF
1-DOF PID コントローラーの 2-DOF コントローラーへの変換
説明
例
プラントの 1-DOF PID コントローラーを設計します。
G = tf(1,[1 0.5 0.1]);
C1 = pidtune(G,'pidf',1.5)C1 =
1 s
Kp + Ki * --- + Kd * --------
s Tf*s+1
with Kp = 1.12, Ki = 0.23, Kd = 1.3, Tf = 0.122
Continuous-time PIDF controller in parallel form.
Model Properties
コントローラーを 2 自由度に変換します。
C2 = make2DOF(C1)
C2 =
1 s
u = Kp (b*r-y) + Ki --- (r-y) + Kd -------- (c*r-y)
s Tf*s+1
with Kp = 1.12, Ki = 0.23, Kd = 1.3, Tf = 0.122, b = 1, c = 1
Continuous-time 2-DOF PIDF controller in parallel form.
Model Properties
この新しいコントローラーの PID ゲインとフィルター定数は同じです。コントローラーにはまた、設定点の重み b および c を含む新しい項が含まれます。既定では、b = c = 1 です。したがって、プラント G を伴う閉ループで、2-DOF コントローラー C2 は C1 と同じ応答を出力します。
T1 = feedback(G*C1,1);
CM = tf(C2);
T2 = CM(1)*feedback(G,-CM(2));
stepplot(T1,T2,'r--')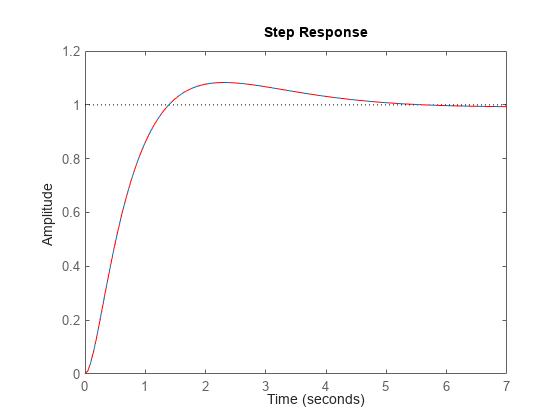
C1 を、b および c の値が異なる 2-DOF コントローラーに変換します。
C2_2 = make2DOF(C1,0.5,0.75)
C2_2 =
1 s
u = Kp (b*r-y) + Ki --- (r-y) + Kd -------- (c*r-y)
s Tf*s+1
with Kp = 1.12, Ki = 0.23, Kd = 1.3, Tf = 0.122, b = 0.5, c = 0.75
Continuous-time 2-DOF PIDF controller in parallel form.
Model Properties
PID ゲインとフィルター定数は変更されないままですが、設定点の重みによって閉ループ応答は変更されます。
CM_2 = tf(C2_2);
T2_2 = CM_2(1)*feedback(G,-CM_2(2));
stepplot(T1,T2_2,'r--')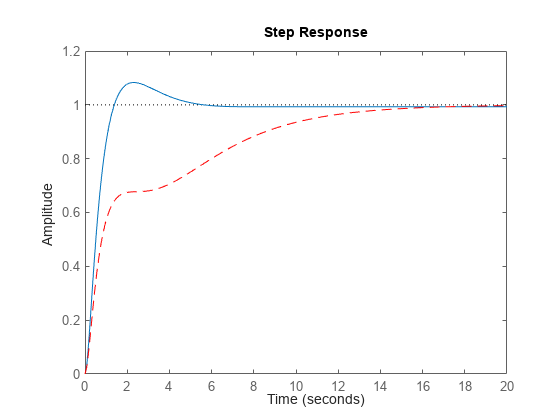
入力引数
出力引数
バージョン履歴
R2015b で導入