solve
最適化問題または方程式問題の求解
構文
説明
solve を使用して、最適化問題または方程式問題の解を求めます。
ヒント
完全なワークフローについては、問題ベースの最適化ワークフローまたは方程式を解くための問題ベースのワークフローを参照してください。
sol = solve(___,Name,Value)
例
最適化問題によって定義された線形計画問題を解きます。
x = optimvar("x"); y = optimvar("y"); prob = optimproblem; prob.Objective = -x - y/3; prob.Constraints.cons1 = x + y <= 2; prob.Constraints.cons2 = x + y/4 <= 1; prob.Constraints.cons3 = x - y <= 2; prob.Constraints.cons4 = x/4 + y >= -1; prob.Constraints.cons5 = x + y >= 1; prob.Constraints.cons6 = -x + y <= 2; sol = solve(prob)
Solving problem using linprog. Optimal solution found.
sol = struct with fields:
x: 0.6667
y: 1.3333
MATLAB® に含まれる関数 peaks の、領域 での最小値を求めます。これを行うために、最適化変数の x と y を作成します。
x = optimvar("x"); y = optimvar("y");
peaks を目的関数とする最適化問題を作成します。
prob = optimproblem("Objective",peaks(x,y));制約を不等式として最適化変数に含めます。
prob.Constraints = x^2 + y^2 <= 4;
x の初期点を 1、y を –1 に設定し、問題を解きます。
x0.x = 1; x0.y = -1; sol = solve(prob,x0)
Solving problem using fmincon. Local minimum found that satisfies the constraints. Optimization completed because the objective function is non-decreasing in feasible directions, to within the value of the optimality tolerance, and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
sol = struct with fields:
x: 0.2283
y: -1.6255
fcn2optimexpr を必要とするサポートされていない関数
目的関数または非線形制約関数が初等関数で構成されていない場合は、fcn2optimexprを使用して、その関数を最適化式に変換しなければなりません。詳細については、非線形関数から最適化式への変換および最適化変数および式でサポートされる演算を参照してください。
現在の例を変換するには:
convpeaks = fcn2optimexpr(@peaks,x,y); prob.Objective = convpeaks; sol2 = solve(prob,x0)
Solving problem using fmincon. Local minimum found that satisfies the constraints. Optimization completed because the objective function is non-decreasing in feasible directions, to within the value of the optimality tolerance, and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
sol2 = struct with fields:
x: 0.2283
y: -1.6255
初期実行可能点がある場合とない場合の両方について整数計画問題を解くためのステップ数を比較します。問題には 8 つの整数変数と 4 つの線形等式制約があり、すべての変数が正になるように制限されています。
prob = optimproblem; x = optimvar("x",8,1,LowerBound=0,Type="integer");
4 つの線形等式制約を作成し、問題に含めます。
Aeq = [22 13 26 33 21 3 14 26
39 16 22 28 26 30 23 24
18 14 29 27 30 38 26 26
41 26 28 36 18 38 16 26];
beq = [ 7872
10466
11322
12058];
cons = Aeq*x == beq;
prob.Constraints.cons = cons;目的関数を作成し、問題に含めます。
f = [2 10 13 17 7 5 7 3]; prob.Objective = f*x;
初期点を使用せずに問題を解き、表示を調べて分枝限定ノードの数を確認します。
[x1,fval1,exitflag1,output1] = solve(prob);
Solving problem using intlinprog.
Running HiGHS 1.11.0: Copyright (c) 2025 HiGHS under MIT licence terms
MIP has 4 rows; 8 cols; 32 nonzeros; 8 integer variables (0 binary)
Coefficient ranges:
Matrix [3e+00, 4e+01]
Cost [2e+00, 2e+01]
Bound [0e+00, 0e+00]
RHS [8e+03, 1e+04]
Presolving model
4 rows, 8 cols, 32 nonzeros 0s
4 rows, 8 cols, 27 nonzeros 0s
Objective function is integral with scale 1
Solving MIP model with:
4 rows
8 cols (0 binary, 8 integer, 0 implied int., 0 continuous, 0 domain fixed)
27 nonzeros
Src: B => Branching; C => Central rounding; F => Feasibility pump; J => Feasibility jump;
H => Heuristic; L => Sub-MIP; P => Empty MIP; R => Randomized rounding; Z => ZI Round;
I => Shifting; S => Solve LP; T => Evaluate node; U => Unbounded; X => User solution;
z => Trivial zero; l => Trivial lower; u => Trivial upper; p => Trivial point
Nodes | B&B Tree | Objective Bounds | Dynamic Constraints | Work
Src Proc. InQueue | Leaves Expl. | BestBound BestSol Gap | Cuts InLp Confl. | LpIters Time
0 0 0 0.00% 0 inf inf 0 0 0 0 0.0s
0 0 0 0.00% 1554.047531 inf inf 0 0 4 4 0.0s
T 14284 1214 5620 78.42% 1690.169125 2849 40.68% 39 5 9987 17146 1.5s
T 21917 1000 8515 86.43% 1736.378236 2113 17.82% 36 5 9873 24182 2.3s
T 26514 250 10328 96.20% 1778.832142 1854 4.05% 31 5 4853 28216 2.6s
26903 0 10609 100.00% 1854 1854 0.00% 39 11 3699 28606 2.6s
Solving report
Status Optimal
Primal bound 1854
Dual bound 1854
Gap 0% (tolerance: 0.01%)
P-D integral 0.345096055496
Solution status feasible
1854 (objective)
0 (bound viol.)
9.63673585375e-14 (int. viol.)
0 (row viol.)
Timing 2.60 (total)
0.00 (presolve)
0.00 (solve)
0.00 (postsolve)
Max sub-MIP depth 3
Nodes 26903
Repair LPs 0 (0 feasible; 0 iterations)
LP iterations 28606 (total)
240 (strong br.)
77 (separation)
2156 (heuristics)
Optimal solution found.
Intlinprog stopped because the objective value is within a gap tolerance of the optimal value, options.AbsoluteGapTolerance = 1e-06. The intcon variables are integer within tolerance, options.ConstraintTolerance = 1e-06.
比較するため、初期実行可能点を使用して解を求めます。
x0.x = [8 62 23 103 53 84 46 34]'; [x2,fval2,exitflag2,output2] = solve(prob,x0);
Solving problem using intlinprog.
Running HiGHS 1.11.0: Copyright (c) 2025 HiGHS under MIT licence terms
MIP has 4 rows; 8 cols; 32 nonzeros; 8 integer variables (0 binary)
Coefficient ranges:
Matrix [3e+00, 4e+01]
Cost [2e+00, 2e+01]
Bound [0e+00, 0e+00]
RHS [8e+03, 1e+04]
Assessing feasibility of MIP using primal feasibility and integrality tolerance of 1e-06
Solution has num max sum
Col infeasibilities 0 0 0
Integer infeasibilities 0 0 0
Row infeasibilities 0 0 0
Row residuals 0 0 0
Presolving model
4 rows, 8 cols, 32 nonzeros 0s
4 rows, 8 cols, 27 nonzeros 0s
MIP start solution is feasible, objective value is 3901
Objective function is integral with scale 1
Solving MIP model with:
4 rows
8 cols (0 binary, 8 integer, 0 implied int., 0 continuous, 0 domain fixed)
27 nonzeros
Src: B => Branching; C => Central rounding; F => Feasibility pump; J => Feasibility jump;
H => Heuristic; L => Sub-MIP; P => Empty MIP; R => Randomized rounding; Z => ZI Round;
I => Shifting; S => Solve LP; T => Evaluate node; U => Unbounded; X => User solution;
z => Trivial zero; l => Trivial lower; u => Trivial upper; p => Trivial point
Nodes | B&B Tree | Objective Bounds | Dynamic Constraints | Work
Src Proc. InQueue | Leaves Expl. | BestBound BestSol Gap | Cuts InLp Confl. | LpIters Time
0 0 0 0.00% 0 3901 100.00% 0 0 0 0 0.0s
0 0 0 0.00% 1554.047531 3901 60.16% 0 0 4 4 0.0s
T 2288 245 945 50.60% 1619.252742 3136 48.37% 132 19 9950 7301 0.6s
T 5117 488 2144 68.07% 1647.130725 2849 42.19% 49 11 9982 12678 1.2s
T 5289 472 2223 68.87% 1647.130725 2768 40.49% 47 11 9622 12967 1.2s
T 7436 677 3113 77.33% 1679.483352 2687 37.50% 60 5 9615 17480 1.7s
T 14162 1165 6012 88.77% 1733.200577 2683 35.40% 33 7 9931 31054 2.8s
T 17245 869 7324 92.67% 1763.046883 2154 18.15% 18 8 9957 36646 3.2s
T 18436 158 7844 97.73% 1779.768134 1854 4.00% 25 8 9941 39041 3.3s
18750 0 8065 100.00% 1854 1854 0.00% 42 11 5634 39537 3.4s
Solving report
Status Optimal
Primal bound 1854
Dual bound 1854
Gap 0% (tolerance: 0.01%)
P-D integral 1.39810645952
Solution status feasible
1854 (objective)
0 (bound viol.)
1.70530256582e-13 (int. viol.)
0 (row viol.)
Timing 3.37 (total)
0.00 (presolve)
0.00 (solve)
0.00 (postsolve)
Max sub-MIP depth 3
Nodes 18750
Repair LPs 0 (0 feasible; 0 iterations)
LP iterations 39537 (total)
590 (strong br.)
98 (separation)
2539 (heuristics)
Optimal solution found.
Intlinprog stopped because the objective value is within a gap tolerance of the optimal value, options.AbsoluteGapTolerance = 1e-06. The intcon variables are integer within tolerance, options.ConstraintTolerance = 1e-06.
fprintf("Without an initial point, solve took %d steps.\nWith an initial point, solve took %d steps.",output1.numnodes,output2.numnodes)Without an initial point, solve took 26903 steps. With an initial point, solve took 18750 steps.
初期点を与えることが常に問題を改善するとは限りません。この問題の場合、初期点を使用すると、時間と計算ステップが節減されます。ただし、問題によっては、初期点によって solve がより多くのステップを必要とする場合があります。
一部のソルバーでは、目的関数値と制約関数値がある場合、それらの値を x0 引数の solve に渡すことができます。これによってソルバーの時間を短縮できます。OptimizationValues オブジェクトのベクトルを渡します。関数 optimvalues を使用して、これらのベクトルを作成します。
目的関数値を使用できるソルバーは次のとおりです。
gagamultiobjparetosearchsurrogateopt
非線形制約関数値を使用できるソルバーは次のとおりです。
paretosearchsurrogateopt
たとえば、初期点のグリッドからの値で開始し、surrogateopt を使用して関数 peaks を最小化します。変数 x に -10 ~ 10 のグリッドを作成し、変数 y に間隔 1/2 で –5/2 ~ 5/2 のグリッドを作成します。初期点での目的関数値を計算します。
x = optimvar("x",LowerBound=-10,UpperBound=10); y = optimvar("y",LowerBound=-5/2,UpperBound=5/2); prob = optimproblem(Objective=peaks(x,y)); xval = -10:10; yval = (-5:5)/2; [x0x,x0y] = meshgrid(xval,yval); peaksvals = peaks(x0x,x0y);
optimvalues を使用して x0 引数の値を渡します。これにより、solve が値を計算する必要がなくなり、solve の時間が短縮されます。行ベクトルとして値を渡します。
x0 = optimvalues(prob,x=x0x(:)',y=x0y(:)',...
Objective=peaksvals(:)');surrogateopt と初期値を使用して、問題を解きます。
[sol,fval,eflag,output] = solve(prob,x0,Solver="surrogateopt")Solving problem using surrogateopt.
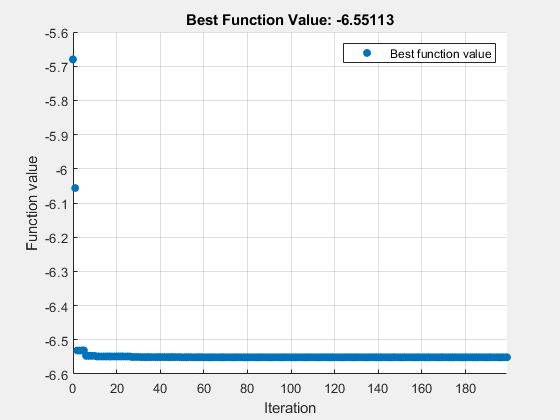
surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
sol = struct with fields:
x: 0.2279
y: -1.6258
fval = -6.5511
eflag =
SolverLimitExceeded
output = struct with fields:
elapsedtime: 48.9299
funccount: 200
constrviolation: 0
ineq: [1×1 struct]
rngstate: [1×1 struct]
message: 'surrogateopt stopped because it exceeded the function evaluation limit set by ↵'options.MaxFunctionEvaluations'.'
solver: 'surrogateopt'
点 [–1,2] から開始して、範囲 で関数 peaks の局所的最小値を求めます。
x = optimvar("x",LowerBound=-5,UpperBound=5); y = optimvar("y",LowerBound=-5,UpperBound=5); x0.x = -1; x0.y = 2; prob = optimproblem(Objective=peaks(x,y)); opts = optimoptions("fmincon",Display="none"); [sol,fval] = solve(prob,x0,Options=opts)
sol = struct with fields:
x: -3.3867
y: 3.6341
fval = 1.1224e-07
GlobalSearch ソルバーを使用して、より良い解を求めようとします。このソルバーは fmincon を複数回実行しますが、それによってより良い解が得られる可能性があります。
ms = GlobalSearch; [sol2,fval2] = solve(prob,x0,ms)
Solving problem using GlobalSearch. GlobalSearch stopped because it analyzed all the trial points. All 15 local solver runs converged with a positive local solver exit flag.
sol2 = struct with fields:
x: 0.2283
y: -1.6255
fval2 = -6.5511
GlobalSearch は、より良い (小さい) 目的関数値をもつ解を求めます。終了メッセージは、ローカル ソルバーの fmincon が 15 回実行されていることを示しています。返された解は、約 –6.5511 の目的関数値をもちます。この値は、最初の解における値である 1.1224e–07 より小さくなります。
問題を解く
反復表示を使用しません。
x = optimvar("x",2,1,LowerBound=0); x3 = optimvar("x3",Type="integer",LowerBound=0,UpperBound=1); prob = optimproblem; prob.Objective = -3*x(1) - 2*x(2) - x3; prob.Constraints.cons1 = x(1) + x(2) + x3 <= 7; prob.Constraints.cons2 = 4*x(1) + 2*x(2) + x3 == 12; options = optimoptions("intlinprog",Display="off"); sol = solve(prob,Options=options)
sol = struct with fields:
x: [2×1 double]
x3: 0
解を検証します。
sol.x
ans = 2×1
0
6
sol.x3
ans = 0
solve に線形計画問題のソルバーとして intlinprog を使用するように強制します。
x = optimvar("x"); y = optimvar("y"); prob = optimproblem; prob.Objective = -x - y/3; prob.Constraints.cons1 = x + y <= 2; prob.Constraints.cons2 = x + y/4 <= 1; prob.Constraints.cons3 = x - y <= 2; prob.Constraints.cons4 = x/4 + y >= -1; prob.Constraints.cons5 = x + y >= 1; prob.Constraints.cons6 = -x + y <= 2; sol = solve(prob,Solver="intlinprog")
Solving problem using intlinprog.
Running HiGHS 1.11.0: Copyright (c) 2025 HiGHS under MIT licence terms
LP has 6 rows; 2 cols; 12 nonzeros
Coefficient ranges:
Matrix [2e-01, 1e+00]
Cost [3e-01, 1e+00]
Bound [0e+00, 0e+00]
RHS [1e+00, 2e+00]
Presolving model
6 rows, 2 cols, 12 nonzeros 0s
4 rows, 2 cols, 8 nonzeros 0s
4 rows, 2 cols, 8 nonzeros 0s
Presolve : Reductions: rows 4(-2); columns 2(-0); elements 8(-4)
Solving the presolved LP
Using EKK dual simplex solver - serial
Iteration Objective Infeasibilities num(sum)
0 -1.3333333333e+03 Ph1: 3(4499); Du: 2(1.33333) 0s
3 -1.1111111111e+00 Pr: 0(0) 0s
Solving the original LP from the solution after postsolve
Model status : Optimal
Simplex iterations: 3
Objective value : -1.1111111111e+00
P-D objective error : 0.0000000000e+00
HiGHS run time : 0.00
Optimal solution found.
No integer variables specified. Intlinprog solved the linear problem.
sol = struct with fields:
x: 0.6667
y: 1.3333
既定ではないオプションによる整数計画問題を解くで説明されている混合整数線形計画問題を解いて、すべての出力データを検証します。
x = optimvar("x",2,1,LowerBound=0); x3 = optimvar("x3",Type="integer",LowerBound=0,UpperBound=1); prob = optimproblem; prob.Objective = -3*x(1) - 2*x(2) - x3; prob.Constraints.cons1 = x(1) + x(2) + x3 <= 7; prob.Constraints.cons2 = 4*x(1) + 2*x(2) + x3 == 12; [sol,fval,exitflag,output] = solve(prob)
Solving problem using intlinprog.
Running HiGHS 1.11.0: Copyright (c) 2025 HiGHS under MIT licence terms
MIP has 2 rows; 3 cols; 6 nonzeros; 1 integer variables (1 binary)
Coefficient ranges:
Matrix [1e+00, 4e+00]
Cost [1e+00, 3e+00]
Bound [1e+00, 1e+00]
RHS [7e+00, 1e+01]
Presolving model
2 rows, 3 cols, 6 nonzeros 0s
0 rows, 0 cols, 0 nonzeros 0s
Presolve: Optimal
Src: B => Branching; C => Central rounding; F => Feasibility pump; J => Feasibility jump;
H => Heuristic; L => Sub-MIP; P => Empty MIP; R => Randomized rounding; Z => ZI Round;
I => Shifting; S => Solve LP; T => Evaluate node; U => Unbounded; X => User solution;
z => Trivial zero; l => Trivial lower; u => Trivial upper; p => Trivial point
Nodes | B&B Tree | Objective Bounds | Dynamic Constraints | Work
Src Proc. InQueue | Leaves Expl. | BestBound BestSol Gap | Cuts InLp Confl. | LpIters Time
0 0 0 0.00% -12 -12 0.00% 0 0 0 0 0.0s
Solving report
Status Optimal
Primal bound -12
Dual bound -12
Gap 0% (tolerance: 0.01%)
P-D integral 0
Solution status feasible
-12 (objective)
0 (bound viol.)
0 (int. viol.)
0 (row viol.)
Timing 0.00 (total)
0.00 (presolve)
0.00 (solve)
0.00 (postsolve)
Max sub-MIP depth 0
Nodes 0
Repair LPs 0 (0 feasible; 0 iterations)
LP iterations 0 (total)
0 (strong br.)
0 (separation)
0 (heuristics)
Optimal solution found.
Intlinprog stopped at the root node because the objective value is within a gap tolerance of the optimal value, options.AbsoluteGapTolerance = 1e-06. The intcon variables are integer within tolerance, options.ConstraintTolerance = 1e-06.
sol = struct with fields:
x: [2×1 double]
x3: 0
fval = -12
exitflag =
OptimalSolution
output = struct with fields:
relativegap: 0
absolutegap: 0
numfeaspoints: 1
numnodes: 0
constrviolation: 0
message: 'Optimal solution found.↵↵Intlinprog stopped at the root node because the objective value is within a gap tolerance of the optimal value, options.AbsoluteGapTolerance = 1e-06. The intcon variables are integer within tolerance, options.ConstraintTolerance = 1e-06.'
solver: 'intlinprog'
整数制約のない問題の場合は、5 番目の出力として空でないラグランジュ乗数構造体も取得できます。
名前付きインデックス変数を使用して、最適化問題を作成して解きます。問題は、収益で重み付けされた、さまざまな空港へのフルーツのフローを最大化することです。これはそれぞれの重み付きフローへの制約に従います。
rng(0) % For reproducibility p = optimproblem(ObjectiveSense="maximize"); flow = optimvar("flow", ... ["apples", "oranges", "bananas", "berries"], ["NYC", "BOS", "LAX"], ... LowerBound=0,Type="integer"); p.Objective = sum(sum(rand(4,3).*flow)); p.Constraints.NYC = rand(1,4)*flow(:,"NYC") <= 10; p.Constraints.BOS = rand(1,4)*flow(:,"BOS") <= 12; p.Constraints.LAX = rand(1,4)*flow(:,"LAX") <= 35; sol = solve(p);
Solving problem using intlinprog.
Running HiGHS 1.11.0: Copyright (c) 2025 HiGHS under MIT licence terms
MIP has 3 rows; 12 cols; 12 nonzeros; 12 integer variables (0 binary)
Coefficient ranges:
Matrix [4e-02, 1e+00]
Cost [1e-01, 1e+00]
Bound [0e+00, 0e+00]
RHS [1e+01, 4e+01]
Presolving model
3 rows, 12 cols, 12 nonzeros 0s
3 rows, 12 cols, 12 nonzeros 0s
Solving MIP model with:
3 rows
12 cols (0 binary, 12 integer, 0 implied int., 0 continuous, 0 domain fixed)
12 nonzeros
Src: B => Branching; C => Central rounding; F => Feasibility pump; J => Feasibility jump;
H => Heuristic; L => Sub-MIP; P => Empty MIP; R => Randomized rounding; Z => ZI Round;
I => Shifting; S => Solve LP; T => Evaluate node; U => Unbounded; X => User solution;
z => Trivial zero; l => Trivial lower; u => Trivial upper; p => Trivial point
Nodes | B&B Tree | Objective Bounds | Dynamic Constraints | Work
Src Proc. InQueue | Leaves Expl. | BestBound BestSol Gap | Cuts InLp Confl. | LpIters Time
J 0 0 0 0.00% inf 945.5907645 Large 0 0 0 0 0.0s
S 0 0 0 0.00% 1079.371705 1027.233133 5.08% 0 0 0 0 0.0s
1 0 1 100.00% 1027.233133 1027.233133 0.00% 0 0 0 3 0.0s
Solving report
Status Optimal
Primal bound 1027.23313332
Dual bound 1027.23313332
Gap 0% (tolerance: 0.01%)
P-D integral 7.11520598605e-05
Solution status feasible
1027.23313332 (objective)
0 (bound viol.)
0 (int. viol.)
0 (row viol.)
Timing 0.01 (total)
0.00 (presolve)
0.00 (solve)
0.00 (postsolve)
Max sub-MIP depth 0
Nodes 1
Repair LPs 0 (0 feasible; 0 iterations)
LP iterations 3 (total)
0 (strong br.)
0 (separation)
0 (heuristics)
Optimal solution found.
Intlinprog stopped at the root node because the objective value is within a gap tolerance of the optimal value, options.AbsoluteGapTolerance = 1e-06. The intcon variables are integer within tolerance, options.ConstraintTolerance = 1e-06.
ニューヨークとロサンゼルスへのオレンジとベリーの最適フローを求めます。
[idxFruit,idxAirports] = findindex(flow, ["oranges","berries"], ["NYC", "LAX"])
idxFruit = 1×2
2 4
idxAirports = 1×2
1 3
orangeBerries = sol.flow(idxFruit, idxAirports)
orangeBerries = 2×2
0 980
70 0
この表示は、NYC 向けのオレンジは 0、70 のベリーが NYC 向け、980 のオレンジが LAX 向けで、LAX 向けのベリーは 0 であることを示しています。
次の最適なフローをリストします。
Fruit Airports
----- --------
Berries NYC
Apples BOS
Oranges LAX
idx = findindex(flow, ["berries", "apples", "oranges"], ["NYC", "BOS", "LAX"])
idx = 1×3
4 5 10
optimalFlow = sol.flow(idx)
optimalFlow = 1×3
70 28 980
この表示は、70 のベリーが NYC 向け、28 のアップルが BOS 向けで、980 のオレンジが LAX 向けであることを示しています。
次の非線形連立方程式を解きます。
問題ベースのアプローチを使用する場合は、まず x を 2 要素の最適化変数として定義します。
x = optimvar("x",2);最初の方程式を最適化等式として作成します。
eq1 = exp(-exp(-(x(1) + x(2)))) == x(2)*(1 + x(1)^2);
同様に、2 番目の方程式も最適化等式として作成します。
eq2 = x(1)*cos(x(2)) + x(2)*sin(x(1)) == 1/2;
方程式問題を作成し、方程式を問題に配置します。
prob = eqnproblem; prob.Equations.eq1 = eq1; prob.Equations.eq2 = eq2;
問題を確認します。
show(prob)
EquationProblem :
Solve for:
x
eq1:
exp((-exp((-(x(1) + x(2)))))) == (x(2) .* (1 + x(1).^2))
eq2:
((x(1) .* cos(x(2))) + (x(2) .* sin(x(1)))) == 0.5
点 [0,0] から始めて問題を解きます。問題ベースのアプローチの場合、初期点を構造体として指定します。変数名は構造体のフィールドとします。この問題の変数は x の 1 つしかありません。
x0.x = [0 0]; [sol,fval,exitflag] = solve(prob,x0)
Solving problem using fsolve. Equation solved. fsolve completed because the vector of function values is near zero as measured by the value of the function tolerance, and the problem appears regular as measured by the gradient. <stopping criteria details>
sol = struct with fields:
x: [2×1 double]
fval = struct with fields:
eq1: -2.4070e-07
eq2: -3.8255e-08
exitflag =
EquationSolved
解の点を表示します。
disp(sol.x)
0.3532
0.6061
fcn2optimexpr を必要とするサポートされていない関数
方程式の関数が初等関数で構成されていない場合、fcn2optimexprを使用して、その関数を最適化式に変換しなければなりません。次に例を示します。
ls1 = fcn2optimexpr(@(x)exp(-exp(-(x(1)+x(2)))),x); eq1 = ls1 == x(2)*(1 + x(1)^2); ls2 = fcn2optimexpr(@(x)x(1)*cos(x(2))+x(2)*sin(x(1)),x); eq2 = ls2 == 1/2;
詳細については、最適化変数および式でサポートされる演算および非線形関数から最適化式への変換を参照してください。
入力引数
名前と値の引数
オプションの引数のペアを Name1=Value1,...,NameN=ValueN として指定します。ここで、Name は引数名で、Value は対応する値です。名前と値の引数は他の引数の後に指定しなければなりませんが、ペアの順序は重要ではありません。
R2021a より前では、コンマを使用して名前と値をそれぞれ区切り、Name を引用符で囲みます。
例: solve(prob,Options=opts)
MultiStart (Global Optimization Toolbox) の開始点の最小数。正の整数として指定します。この引数は、ms 引数を使用して solve を呼び出す場合にのみ適用されます。solve は x0 のすべての値を開始点として使用します。MinNumStartPoints が x0 の値の数より大きい場合、solve は問題の範囲内でランダムかつ一様に多くの開始点を生成します。成分が非有界の場合、solve は MultiStart の既定の疑似境界を使用して点を生成します。
例: solve(prob,x0,ms,MinNumStartPoints=50)
データ型: double
最適化オプション。optimoptions で作成したオブジェクトまたはオプション構造体 (optimset で作成したものなど) として指定します。
'solver' 引数のリファレンスで詳しく述べているとおり、関数 solve は内部的に、関連するソルバーを呼び出します。options にソルバーとの互換性があることを確認します。たとえば、intlinprog ではオプションを構造体にすることはできません。lsqnonneg ではオプションをオブジェクトにすることはできません。
intlinprog の解または解を求める速度を改善するためのオプション設定については、整数線形計画法の調整を参照してください。linprog の場合、既定の 'dual-simplex' アルゴリズムの方が、一般にメモリ効率が高く、迅速です。状況によっては、Algorithm オプションが 'interior-point' の場合に、linprog が大規模な問題をより迅速に解くことがあります。非線形問題の解を改善するためのオプション設定については、一般的に使用される最適化オプション: 調整とトラブルシューティングおよび結果の向上を参照してください。
例: options = optimoptions('intlinprog','Display','none')
最適化ソルバー。リストされているソルバーの名前として指定します。以下の表には、最適化問題について、Global Optimization Toolbox のソルバーを含め、問題のタイプごとに使用可能なソルバーが示されています。方程式問題の詳細については、最適化ソルバーの詳細の後に示しています。
整数制約をもつ非線形問題を prob2struct で変換する場合、結果として得られる問題構造体は選択したソルバーに依存します。Global Optimization Toolbox ライセンスをお持ちでない場合は、このソルバーを指定する必要があります。非線形問題ベースの最適化における整数制約を参照してください。
最適化問題のタイプごとに、既定のソルバーを以下の表に示します。
| 問題のタイプ | 既定のソルバー |
|---|---|
| 線形計画法 (LP) | linprog |
| 混合整数線形計画法 (MILP) | intlinprog |
| 二次計画法 (QP) | quadprog |
| 2 次錐計画法 (SOCP) | coneprog |
| 線形最小二乗法 | lsqlin |
| 非線形最小二乗法 | lsqnonlin |
| 非線形計画法 (NLP) | |
| 混合整数非線形計画法 (MINLP) | ga (Global Optimization Toolbox) |
| 多目的 | gamultiobj (Global Optimization Toolbox) |
次の表で、 はその問題のタイプにソルバーを使用できることを表し、"x" はソルバーを使用できないことを表しています。
はその問題のタイプにソルバーを使用できることを表し、"x" はソルバーを使用できないことを表しています。
問題のタイプ | LP | MILP | QP | SOCP | 線形最小二乗法 | 非線形最小二乗法 | NLP | MINLP |
|---|---|---|---|---|---|---|---|---|
| ソルバー | ||||||||
linprog |
| x | x | x | x | x | x | x |
intlinprog |
|
| x | x | x | x | x | x |
quadprog |
| x |
|
|
| x | x | x |
coneprog |
| x | x |
| x | x | x | x |
lsqlin | x | x | x | x |
| x | x | x |
lsqnonneg | x | x | x | x |
| x | x | x |
lsqnonlin | x | x | x | x |
|
| x | x |
fminunc |
| x |
| x |
|
|
| x |
fmincon |
| x |
|
|
|
|
| x |
fminbnd | x | x | x | x |
|
|
| x |
fminsearch | x | x | x | x |
|
|
| x |
patternsearch (Global Optimization Toolbox) |
| x |
|
|
|
|
| x |
ga (Global Optimization Toolbox) |
|
|
|
|
|
|
|
|
particleswarm (Global Optimization Toolbox) |
| x |
| x |
|
|
| x |
simulannealbnd (Global Optimization Toolbox) |
| x |
| x |
|
|
| x |
surrogateopt (Global Optimization Toolbox) |
|
|
|
|
|
|
|
|
gamultiobj (Global Optimization Toolbox) |
|
|
|
|
|
|
|
|
paretosearch (Global Optimization Toolbox) |
| x |
|
|
|
|
| x |
メモ
最小二乗問題のソルバーとして lsqcurvefit を選択した場合、solve は lsqnonlin を使用します。solve に関して lsqcurvefit ソルバーと lsqnonlin ソルバーは同一です。
注意
最大化問題 (prob.ObjectiveSense が "max" または "maximize") の場合は、最小二乗ソルバー (名前が lsq で始まるソルバー) を指定しないでください。これらのソルバーは最大化を実行できないので、指定すると solve でエラーが発生します。
以下の表には、方程式の求解について、問題のタイプごとに使用可能なソルバーが示されています。以下の表では、
* は、その問題のタイプの既定のソルバーを示します。
Y は、使用可能なソルバーを示します。
N は、使用できないソルバーを示します。
方程式でサポートされているソルバー
| 方程式のタイプ | lsqlin | lsqnonneg | fzero | fsolve | lsqnonlin |
|---|---|---|---|---|---|
| 線形 | * | N | Y (スカラーのみ) | Y | Y |
| 範囲付き線形 | * | Y | N | N | Y |
| スカラー非線形 | N | N | * | Y | Y |
| 非線形方程式 | N | N | N | * | Y |
| 範囲付き非線形方程式 | N | N | N | N | * |
例: "intlinprog"
データ型: char | string
非線形目的関数に対して自動微分 (AD) を使用するための指示。'auto' (可能な場合に AD を使用)、'auto-forward' (可能な場合にフォワード モードの AD を使用)、'auto-reverse' (可能な場合にリバース モードの AD を使用)、または 'finite-differences' (AD を使用しない) として指定します。最適化変数および式でサポートされる演算で説明されているように、目的関数がサポートされている場合は、auto などを選択すると、基礎となるソルバーが問題の求解時に勾配情報を使用するようになります。例については、問題ベースの最適化における自動微分の効果を参照してください。
ソルバーは既定で次のタイプの AD を選択します。
一般的な非線形目的関数の場合、
fminconは既定で目的関数用のリバース モードの AD になります。fminconは、非線形制約の数が変数の数よりも少ない場合に既定で非線形制約関数用のリバース モードの AD になります。それ以外の場合、fminconは既定で非線形制約関数用のフォワード モードの AD になります。一般的な非線形目的関数の場合、
fminuncは既定でリバース モードの AD になります。最小二乗目的関数の場合、
fminconとfminuncは既定で目的関数用のフォワード モードの AD になります。問題ベースの最小二乗目的関数の定義については、問題ベースの最小二乗法の目的関数の記述を参照してください。lsqnonlinは、目的ベクトルに含まれる要素数が変数の数以上である場合に既定でフォワード モードの AD になります。それ以外の場合、lsqnonlinは既定でリバース モードの AD になります。fsolveは、方程式の数が変数の数以上の場合に既定でフォワード モードの AD になります。それ以外の場合、fsolveは既定でリバース モードの AD になります。
例: 'finite-differences'
データ型: char | string
非線形制約関数に対して自動微分 (AD) を使用するための指示。'auto' (可能な場合に AD を使用)、'auto-forward' (可能な場合にフォワード モードの AD を使用)、'auto-reverse' (可能な場合にリバース モードの AD を使用)、または 'finite-differences' (AD を使用しない) として指定します。最適化変数および式でサポートされる演算で説明されているように、制約関数がサポートされている場合は、auto などを選択すると、基礎となるソルバーが問題の求解時に勾配情報を使用するようになります。例については、問題ベースの最適化における自動微分の効果を参照してください。
ソルバーは既定で次のタイプの AD を選択します。
一般的な非線形目的関数の場合、
fminconは既定で目的関数用のリバース モードの AD になります。fminconは、非線形制約の数が変数の数よりも少ない場合に既定で非線形制約関数用のリバース モードの AD になります。それ以外の場合、fminconは既定で非線形制約関数用のフォワード モードの AD になります。一般的な非線形目的関数の場合、
fminuncは既定でリバース モードの AD になります。最小二乗目的関数の場合、
fminconとfminuncは既定で目的関数用のフォワード モードの AD になります。問題ベースの最小二乗目的関数の定義については、問題ベースの最小二乗法の目的関数の記述を参照してください。lsqnonlinは、目的ベクトルに含まれる要素数が変数の数以上である場合に既定でフォワード モードの AD になります。それ以外の場合、lsqnonlinは既定でリバース モードの AD になります。fsolveは、方程式の数が変数の数以上の場合に既定でフォワード モードの AD になります。それ以外の場合、fsolveは既定でリバース モードの AD になります。
例: 'finite-differences'
データ型: char | string
非線形制約関数に対して自動微分 (AD) を使用するための指示。'auto' (可能な場合に AD を使用)、'auto-forward' (可能な場合にフォワード モードの AD を使用)、'auto-reverse' (可能な場合にリバース モードの AD を使用)、または 'finite-differences' (AD を使用しない) として指定します。最適化変数および式でサポートされる演算で説明されているように、方程式関数がサポートされている場合は、auto などを選択すると、基礎となるソルバーが問題の求解時に勾配情報を使用するようになります。例については、問題ベースの最適化における自動微分の効果を参照してください。
ソルバーは既定で次のタイプの AD を選択します。
一般的な非線形目的関数の場合、
fminconは既定で目的関数用のリバース モードの AD になります。fminconは、非線形制約の数が変数の数よりも少ない場合に既定で非線形制約関数用のリバース モードの AD になります。それ以外の場合、fminconは既定で非線形制約関数用のフォワード モードの AD になります。一般的な非線形目的関数の場合、
fminuncは既定でリバース モードの AD になります。最小二乗目的関数の場合、
fminconとfminuncは既定で目的関数用のフォワード モードの AD になります。問題ベースの最小二乗目的関数の定義については、問題ベースの最小二乗法の目的関数の記述を参照してください。lsqnonlinは、目的ベクトルに含まれる要素数が変数の数以上である場合に既定でフォワード モードの AD になります。それ以外の場合、lsqnonlinは既定でリバース モードの AD になります。fsolveは、方程式の数が変数の数以上の場合に既定でフォワード モードの AD になります。それ以外の場合、fsolveは既定でリバース モードの AD になります。
例: 'finite-differences'
データ型: char | string