このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
ga
遺伝的アルゴリズムを使用して関数の最小値を見つける
構文
説明
x = ga(fun,nvars)fun の局所的な制約なし最小値 x を見つけます。nvars は fun の次元 (設計変数の数) です。
メモ
追加パラメーターの受け渡し は、必要に応じて他のパラメーターを目的関数と非線形制約関数に渡す方法を説明します。
例
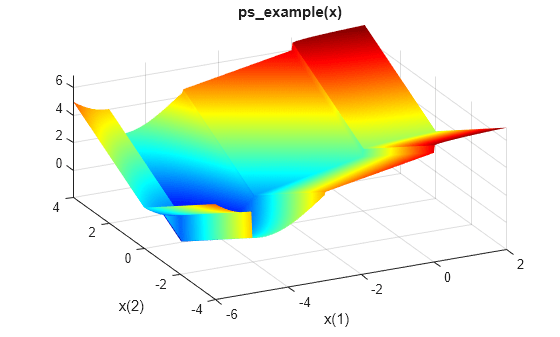
この例を実行すると、ps_example.m ファイルが含まれます。関数をプロットします。
xi = linspace(-6,2,300); yi = linspace(-4,4,300); [X,Y] = meshgrid(xi,yi); Z = ps_example([X(:),Y(:)]); Z = reshape(Z,size(X)); surf(X,Y,Z,'MeshStyle','none') colormap 'jet' view(-26,43) xlabel('x(1)') ylabel('x(2)') title('ps\_example(x)')
ga を使用してこの関数の最小値を見つけます。
rng default % For reproducibility x = ga(@ps_example,2)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
x = 1×2
-4.6793 -0.0860
遺伝的アルゴリズムを使用して、領域 x(1) + x(2) >= 1 および x(2) <= 5 + x(1) 上の ps_example 関数を最小化します。この関数は、この例を実行するときに含められます。
まず、2 つの不等式制約を行列形式 A*x <= b に変換します。つまり、不等式の左側の x 変数を取得し、両方の不等式が以下になるようにします。
-x(1) -x(2) <= -1
-x(1) + x(2) <= 5
A = [-1,-1;
-1,1];
b = [-1;5];ga を使用して制約問題を解きます。
rng default % For reproducibility fun = @ps_example; x = ga(fun,2,A,b)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
x = 1×2
0.9992 0.0000
制約は、制約許容値のデフォルト値 1e-3 内で満たされます。これを確認するには、負の成分を持つ A*x' - b を計算します。
disp(A*x' - b)
0.0008 -5.9992
遺伝的アルゴリズムを使用して、領域 x(1) + x(2) >= 1 および x(2) == 5 + x(1) 上の ps_example 関数を最小化します。この関数は、この例を実行するときに含められます。
まず、2 つの制約を行列形式 A*x <= b と Aeq*x = beq に変換します。つまり、式の左側にある x 変数を取得し、不等式を以下という形式にします。
-x(1) -x(2) <= -1
-x(1) + x(2) == 5
A = [-1 -1]; b = -1; Aeq = [-1 1]; beq = 5;
ga を使用して制約問題を解きます。
rng default % For reproducibility fun = @ps_example; x = ga(fun,2,A,b,Aeq,beq)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
x = 1×2
-2.0005 2.9995
制約がデフォルト値 ConstraintTolerance、1e-3 内で満たされていることを確認します。
disp(A*x' - b)
1.0000e-03
disp(Aeq*x' - beq)
-1.5494e-05
遺伝的アルゴリズムを使用して、領域 x(1) + x(2) >= 1 および x(2) == 5 + x(1) 上の ps_example 関数を最小化します。この例を実行すると、ps_example 関数が含まれます。さらに、境界 1 <= x(1) <= 6 と -3 <= x(2) <= 8 を設定します。
まず、2 つの線形制約を行列形式 A*x <= b と Aeq*x = beq に変換します。つまり、式の左側にある x 変数を取得し、不等式を以下という形式にします。
-x(1) -x(2) <= -1
-x(1) + x(2) == 5
A = [-1 -1]; b = -1; Aeq = [-1 1]; beq = 5;
境界 lb と ub を設定します。
lb = [1 -3]; ub = [6 8];
ga を使用して制約問題を解きます。
rng default % For reproducibility fun = @ps_example; x = ga(fun,2,A,b,Aeq,beq,lb,ub)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
x = 1×2
1.0000 6.0000
線形制約がデフォルト値 ConstraintTolerance、1e-3 内で満たされていることを確認します。
disp(A*x' - b)
-6.0000
disp(Aeq*x' - beq)
-6.6335e-07
遺伝的アルゴリズムを使用して、領域 および 上の ps_example 関数を最小化します。この例を実行すると、ps_example 関数が含まれます。
これを行うには、最初の出力 c に不等式制約を返し、2 番目の出力 ceq に等式制約を返す関数 ellipsecons.m を使用します。この例を実行すると、ellipsecons 関数が含まれます。ellipsecons コードを調べます。
type ellipseconsfunction [c,ceq] = ellipsecons(x) c = 2*x(1)^2 + x(2)^2 - 3; ceq = (x(1)+1)^2 - (x(2)/2)^4;
nonlcon 引数として ellipsecons への関数ハンドルを含めます。
nonlcon = @ellipsecons; fun = @ps_example; rng default % For reproducibility x = ga(fun,2,[],[],[],[],[],[],nonlcon)
Optimization finished: average change in the fitness value less than options.FunctionTolerance and constraint violation is less than options.ConstraintTolerance.
x = 1×2
-0.9766 0.0362
x で非線形制約が満たされていることを確認します。制約は、c ≤ 0 かつ ceq = 0 で、ConstraintTolerance、1e-3 のデフォルト値の範囲内である場合に満たされます。
[c,ceq] = nonlcon(x)
c = -1.0911
ceq = 5.4645e-04
遺伝的アルゴリズムを使用して、デフォルトよりも小さい制約許容値を使用して、領域 x(1) + x(2) >= 1 および x(2) == 5 + x(1) 上の ps_example 関数を最小化します。この例を実行すると、ps_example 関数が含まれます。
まず、2 つの制約を行列形式 A*x <= b と Aeq*x = beq に変換します。つまり、式の左側にある x 変数を取得し、不等式を以下という形式にします。
-x(1) -x(2) <= -1
-x(1) + x(2) == 5
A = [-1 -1]; b = -1; Aeq = [-1 1]; beq = 5;
より正確なソリューションを得るには、制約許容値を 1e-6 に設定します。ソルバーの進行状況を監視するには、プロット関数を設定します。
options = optimoptions('ga','ConstraintTolerance',1e-6,'PlotFcn', @gaplotbestf);
最小化問題を解きます。
rng default % For reproducibility fun = @ps_example; x = ga(fun,2,A,b,Aeq,beq,[],[],[],options)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.

x = 1×2
-2.0000 3.0000
線形制約が 1e-6 以内で満たされていることを確認します。
disp(A*x' - b)
9.9967e-07
disp(Aeq*x' - beq)
-2.9701e-08
遺伝的アルゴリズムを使用して、x(1) が整数であるという制約の下で ps_example 関数を最小化します。この関数は、この例を実行するときに含められます。
intcon = 1; rng default % For reproducibility fun = @ps_example; A = []; b = []; Aeq = []; beq = []; lb = []; ub = []; nonlcon = []; x = ga(fun,2,A,b,Aeq,beq,lb,ub,nonlcon,intcon)
ga stopped because the average change in the penalty function value is less than options.FunctionTolerance and the constraint violation is less than options.ConstraintTolerance.
x = 1×2
-5.0000 -0.0834
遺伝的アルゴリズムを使用して、整数制約の非線形問題を最小化します。最小値の位置と最小関数値の両方を取得します。この例を実行すると、目的関数 ps_example が含まれます。
intcon = 1; rng default % For reproducibility fun = @ps_example; A = []; b = []; Aeq = []; beq = []; lb = []; ub = []; nonlcon = []; [x,fval] = ga(fun,2,A,b,Aeq,beq,lb,ub,nonlcon,intcon)
ga stopped because the average change in the penalty function value is less than options.FunctionTolerance and the constraint violation is less than options.ConstraintTolerance.
x = 1×2
-5.0000 -0.0834
fval = -1.8344
この結果を制約のない問題の解決と比較します。
[x,fval] = ga(fun,2)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
x = 1×2
-4.6906 -0.0078
fval = -1.9918
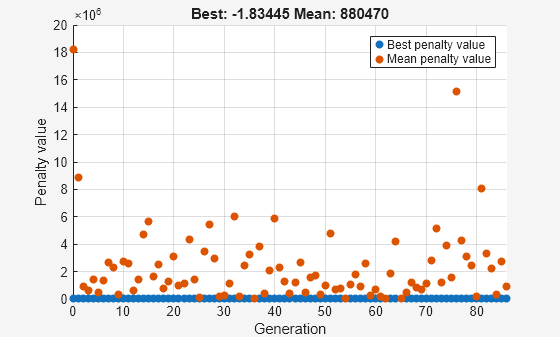
遺伝的アルゴリズムを使用して、x(1) が整数値になるように制約された ps_example 関数を最小化します。この例を実行すると、ps_example 関数が含まれます。ソルバーが停止した理由と ga が最小値をどのように探索したかを理解するには、exitflag と output の結果を取得します。また、ソルバーが進行するにつれて、観測された目的関数の最小値をプロットします。
intcon = 1; rng default % For reproducibility fun = @ps_example; A = []; b = []; Aeq = []; beq = []; lb = []; ub = []; nonlcon = []; options = optimoptions('ga','PlotFcn', @gaplotbestf); [x,fval,exitflag,output] = ga(fun,2,A,b,Aeq,beq,lb,ub,nonlcon,intcon,options)
ga stopped because the average change in the penalty function value is less than options.FunctionTolerance and the constraint violation is less than options.ConstraintTolerance.
x = 1×2
-5.0000 -0.0834
fval = -1.8344
exitflag = 1
output = struct with fields:
problemtype: 'integerconstraints'
rngstate: [1×1 struct]
generations: 86
funccount: 3311
message: 'ga stopped because the average change in the penalty function value is less than options.FunctionTolerance and ↵the constraint violation is less than options.ConstraintTolerance.'
maxconstraint: 0
hybridflag: []
遺伝的アルゴリズムを使用して、x(1) が整数値になるように制約された ps_example 関数を最小化します。この例を実行すると、ps_example 関数が含まれます。最終的な母集団とスコアのベクトルを含むすべての出力を取得します。
intcon = 1; rng default % For reproducibility fun = @ps_example; A = []; b = []; Aeq = []; beq = []; lb = []; ub = []; nonlcon = []; [x,fval,exitflag,output,population,scores] = ga(fun,2,A,b,Aeq,beq,lb,ub,nonlcon,intcon);
ga stopped because the average change in the penalty function value is less than options.FunctionTolerance and the constraint violation is less than options.ConstraintTolerance.
最終的な母集団の最初の 10 人のメンバーと、それに対応するスコアを調べます。これらすべての母集団メンバーについて、x(1) は整数値であることに注意してください。整数 ga アルゴリズムは整数実行可能な母集団のみを生成します。
disp(population(1:10,:))
1.0e+03 *
-0.0050 -0.0001
-0.0050 -0.0001
-1.6420 0.0027
-1.5070 0.0010
-0.4540 0.0104
-0.2530 -0.0011
-0.1210 -0.0003
-0.1040 0.1314
-0.0140 -0.0010
0.0160 -0.0002
disp(scores(1:10))
1.0e+06 *
-0.0000
-0.0000
2.6798
2.2560
0.2016
0.0615
0.0135
0.0099
0.0001
0.0000
入力引数
出力引数
詳細
ヒント
gaによって呼び出すことができる独立変数への追加パラメーターを持つ関数を記述するには、追加パラメーターの受け渡し を参照してください。母集団タイプ
Double Vector(デフォルト) を使用する問題の場合、gaは入力がタイプcomplexである関数を受け入れません。複雑なデータを含む問題を解決するには、実部と虚部を分離して実数ベクトルを受け入れるように関数を記述します。
アルゴリズム
遺伝的アルゴリズムの説明については、遺伝的アルゴリズムの仕組み を参照してください。
混合整数計画アルゴリズムの説明については、整数gaアルゴリズム を参照してください。
非線形制約アルゴリズムの説明については、遺伝的アルゴリズムのための非線形制約ソルバーアルゴリズム を参照してください。
代替機能
アプリ
最適化ライブ エディター タスクが ga にビジュアル インターフェイスを提供します。
参照
[1] Goldberg, David E., Genetic Algorithms in Search, Optimization & Machine Learning, Addison-Wesley, 1989.
[2] A. R. Conn, N. I. M. Gould, and Ph. L. Toint. “A Globally Convergent Augmented Lagrangian Algorithm for Optimization with General Constraints and Simple Bounds”, SIAM Journal on Numerical Analysis, Volume 28, Number 2, pages 545–572, 1991.
[3] A. R. Conn, N. I. M. Gould, and Ph. L. Toint. “A Globally Convergent Augmented Lagrangian Barrier Algorithm for Optimization with General Inequality Constraints and Simple Bounds”, Mathematics of Computation, Volume 66, Number 217, pages 261–288, 1997.