このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
gamultiobj
遺伝的アルゴリズムを使用して複数の適応度関数のパレート フロントを見つける
構文
説明
x = gamultiobj(fun,nvars)fun で定義された目的関数の パレート フロント 上で x を見つけます。nvars は最適化問題の次元 (決定変数の数) です。解 x は局所的であるため、大域的パレート フロントにはならない可能性があります。
メモ
追加パラメーターの受け渡し は、必要に応じて他のパラメーターを目的関数と非線形制約関数に渡す方法を説明します。
x = gamultiobj(fun,nvars,A,b,Aeq,beq,lb,ub,nonlcon)nonlcon で定義された制約に従ってパレート集合を見つけます。関数 nonlcon は x を受け入れ、非線形不等式と等式をそれぞれ表すベクトル c と ceq を返します。gamultiobj は、c(x) ≤ 0 および ceq(x) = 0 となるように fun を最小化します。(境界が存在しない場合は、lb = [] と ub = [] を設定します。) gamultiobj は、デフォルトの PopulationType オプション ('doubleVector') に対してのみ非線形制約をサポートします。
例
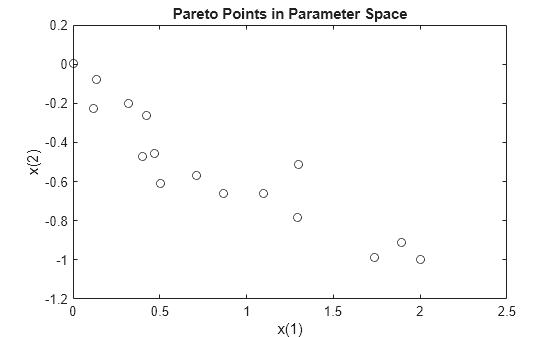
単純な多目的問題のパレート フロントを見つけます。2 つの目的と 2 つの決定変数 x があります。
fitnessfcn = @(x)[norm(x)^2,0.5*norm(x(:)-[2;-1])^2+2];
この目的関数のパレート フロントを見つけます。
rng default % For reproducibility x = gamultiobj(fitnessfcn,2);
gamultiobj stopped because the average change in the spread of Pareto solutions is less than options.FunctionTolerance.
解の点をプロットします。
plot(x(:,1),x(:,2),'ko') xlabel('x(1)') ylabel('x(2)') title('Pareto Points in Parameter Space')
この問題における線形制約の効果を確認するには、線形制約を伴う多目的問題 を参照してください。
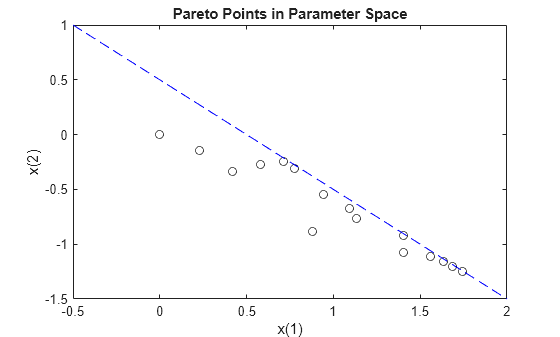
この例では、線形制約がある場合の多目的問題のパレート フロントを見つける方法を示します。
2 つの目的関数と 2 つの決定変数 x があります。
fitnessfcn = @(x)[norm(x)^2,0.5*norm(x(:)-[2;-1])^2+2];
線形制約は です。
A = [1,1]; b = 1/2;
パレート フロントを見つけます。
rng default % For reproducibility x = gamultiobj(fitnessfcn,2,A,b);
gamultiobj stopped because the average change in the spread of Pareto solutions is less than options.FunctionTolerance.
制約付き解と線形制約をプロットします。
plot(x(:,1),x(:,2),'ko') t = linspace(-1/2,2); y = 1/2 - t; hold on plot(t,y,'b--') xlabel('x(1)') ylabel('x(2)') title('Pareto Points in Parameter Space') hold off
この問題から線形制約を削除した場合の効果を確認するには、単純な多目的問題 を参照してください。
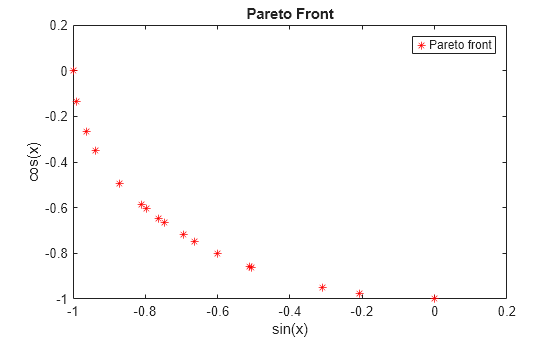
区間 上の 2 つの適応度関数sin(x) と cos(x) のパレート フロントを見つけます。
fitnessfcn = @(x)[sin(x),cos(x)]; nvars = 1; lb = 0; ub = 2*pi; rng default % for reproducibility x = gamultiobj(fitnessfcn,nvars,[],[],[],[],lb,ub)
gamultiobj stopped because the average change in the spread of Pareto solutions is less than options.FunctionTolerance.
x = 18×1
4.7124
4.7124
3.1415
3.6733
3.9845
3.4582
3.9098
4.4409
4.0846
3.8686
4.1976
4.0093
4.5791
3.6800
4.0656
⋮
解をプロットします。gamultiobj は、パレート フロント全体に沿って点を見つけます。
plot(sin(x),cos(x),'r*') xlabel('sin(x)') ylabel('cos(x)') title('Pareto Front') legend('Pareto front')
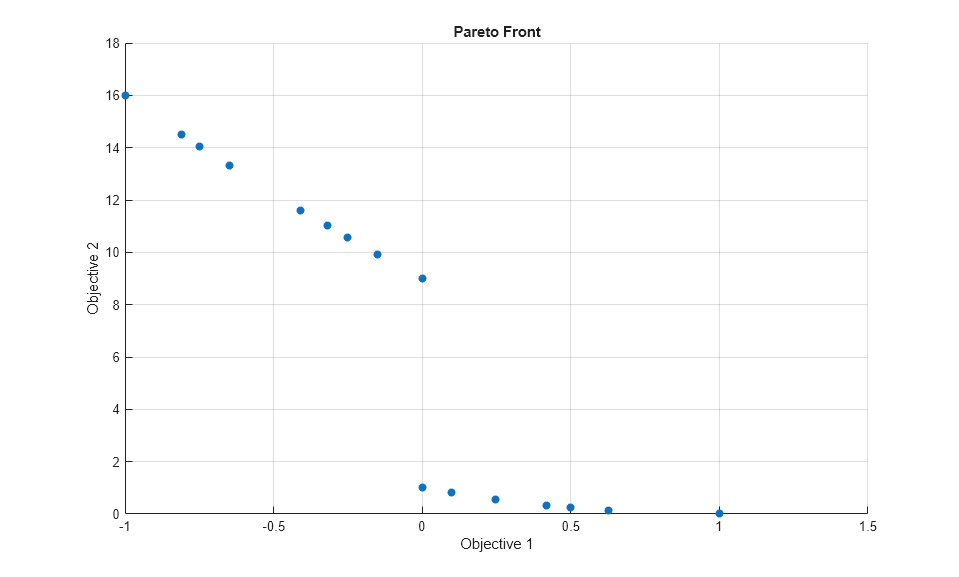
2 つの目的を持つシャッファーの第 2 関数のパレート フロントを見つけてプロットします。この関数には切断されたパレート フロントがあります。
このコードを MATLAB ® パス上の関数ファイルにコピーします。
function y = schaffer2(x) % y has two columns % Initialize y for two objectives and for all x y = zeros(length(x),2); % Evaluate first objective. % This objective is piecewise continuous. for i = 1:length(x) if x(i) <= 1 y(i,1) = -x(i); elseif x(i) <=3 y(i,1) = x(i) -2; elseif x(i) <=4 y(i,1) = 4 - x(i); else y(i,1) = x(i) - 4; end end % Evaluate second objective y(:,2) = (x -5).^2;
2 つの目標を計画します。
x = -1:0.1:8; y = schaffer2(x); plot(x,y(:,1),'r',x,y(:,2),'b'); xlabel x ylabel 'schaffer2(x)' legend('Objective 1','Objective 2')
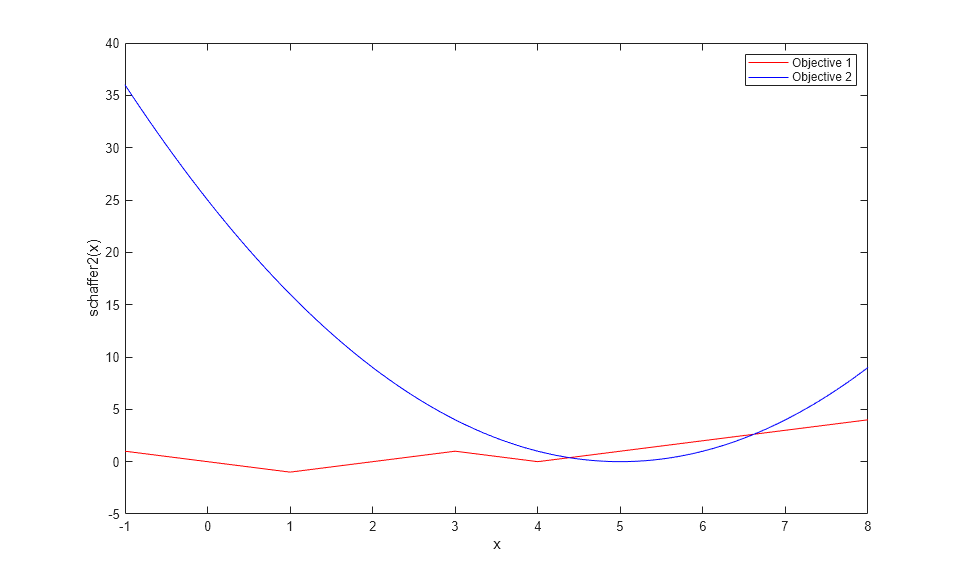
2 つの目的関数は、範囲[1,3] と [4,5] 内の x を競います。しかし、パレート最適フロントは、範囲[1,2] と [4,5] 内の x に対応する 2 つの切断された領域のみで構成されます。領域 [2,3] は [4,5] より劣っているため、切断された領域が存在します。その範囲では、目的関数 1 は同じ値を持ちますが、目的関数 2 は小さくなります。
母集団のメンバーを ![]() の範囲内に保つように境界を設定します。
の範囲内に保つように境界を設定します。
lb = -5; ub = 10;
gamultiobj の実行時にパレート フロントを表示するオプションを設定します。
options = optimoptions('gamultiobj','PlotFcn',@gaplotpareto);
gamultiobj を呼び出します。
rng default % For reproducibility [x,fval,exitflag,output] = gamultiobj(@schaffer2,1,[],[],[],[],lb,ub,options);
gamultiobj stopped because it exceeded options.MaxGenerations.
2 つの問題変数で 2 つの目的関数を作成します。
rng default % For reproducibility M = diag([-1 -1]) + randn(2)/4; % Two problem variables fun = @(x)[(x').^2 / 30 + M*x']; % Two objectives
2 番目の変数は整数である必要があることを指定します。
intcon = 2;
問題の範囲、gaplotpareto プロット関数、および母集団サイズ 100 を指定します。
lb = [0 0]; ub = [100 50]; options = optimoptions("gamultiobj","PlotFcn","gaplotpareto",... "PopulationSize",100);
問題のパレート集合を見つけます。
nvars = 2; A = []; b = []; Aeq = []; beq = []; nonlcon = []; [x,fval] = gamultiobj(fun,nvars,A,b,Aeq,beq,lb,ub,nonlcon,intcon,options);
gamultiobj stopped because the average change in the spread of Pareto solutions is less than options.FunctionTolerance.
解決策を 10 個リストし、2 番目の変数が整数値であることに注意してください。
x(1:10,:)
ans = 10×2
8.3393 28.0000
12.9927 49.0000
7.1611 27.0000
7.0210 18.0000
0.0004 12.0000
9.0989 44.0000
9.3974 29.0000
0.5537 17.0000
6.4010 17.0000
7.0531 31.0000
単純な多目的問題を実行し、利用可能なすべての出力を取得します。
再現性のために乱数ジェネレータを設定します。
rng default
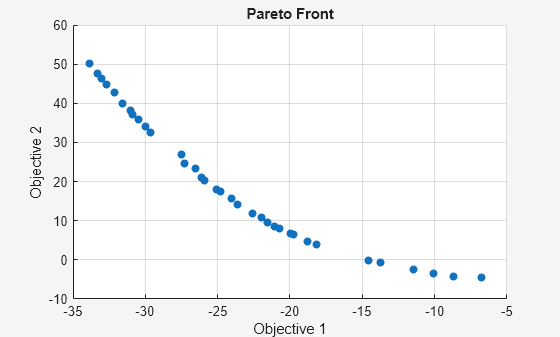
適応度関数を、3 つの制御変数を持ち、2 つの適応度関数値を返す関数である kur_multiobjective に設定します。
fitnessfcn = @kur_multiobjective; nvars = 3;
kur_multiobjective 関数のコードは次のとおりです。
function y = kur_multiobjective(x) %KUR_MULTIOBJECTIVE Objective function for a multiobjective problem. % The Pareto-optimal set for this two-objective problem is nonconvex as % well as disconnected. The function KUR_MULTIOBJECTIVE computes two % objectives and returns a vector y of size 2-by-1. % % Reference: Kalyanmoy Deb, "Multi-Objective Optimization using % Evolutionary Algorithms", John Wiley & Sons ISBN 047187339 % Copyright 2007 The MathWorks, Inc. % Initialize for two objectives y = zeros(2,1); % Compute first objective for i = 1:2 y(1) = y(1) - 10*exp(-0.2*sqrt(x(i)^2 + x(i+1)^2)); end % Compute second objective for i = 1:3 y(2) = y(2) + abs(x(i))^0.8 + 5*sin(x(i)^3); end
すべての変数に下限と上限を設定します。
ub = [5 5 5]; lb = -ub;
この問題のパレート フロントとその他すべての出力を見つけます。
[x,fval,exitflag,output,population,scores] = gamultiobj(fitnessfcn,nvars, ...
[],[],[],[],lb,ub);
gamultiobj stopped because the average change in the spread of Pareto solutions is less than options.FunctionTolerance.
返された変数のいくつかのサイズを調べます。
sizex = size(x) sizepopulation = size(population) sizescores = size(scores)
sizex =
18 3
sizepopulation =
50 3
sizescores =
50 2
返されたパレート フロントには18 個の点が含まれます。最終的な母集団は 50 人です。各 population 行には 3 つの決定変数に対応する 3 つの次元があります。各 scores 行には、2 つの適応度関数に対応する 2 つの次元があります。
入力引数
出力引数
詳細
パレート フロントは、非劣性適応度関数値を持つパラメーター空間(決定変数の空間)内の点の集合です。
言い換えれば、パレート フロントの各点において、1 つの適応度関数を低下させることしかできません。詳細については、多目的最適化とはを参照してください。
大域的最適解と局所的最適解 と同様に、パレート フロントは局所的であっても大域的ではない可能性があります。「局所的」とは、パレート点が近くの点と比較して劣っていない可能性があるが、パラメーター空間内でより離れた点ではすべてのコンポーネントで関数値が低くなる可能性があることを意味します。
アルゴリズム
gamultiobj は、制御されたエリート遺伝的アルゴリズム (NSGA-II [1] の派生) を使用します。エリート主義的な GA は常に、より優れた適応度値 (ランク) を持つ個体を優先します。制御されたエリート主義的な GA は、適応度の値が低い場合でも、母集団の多様性を高めるのに役立つ個体を優先します。最適なパレート フロントに収束するためには、母集団の多様性を維持することが重要です。アルゴリズムが進むにつれて、母集団のエリートメンバーを制御することで多様性が維持されます。ParetoFraction と DistanceMeasureFcn の 2 つのオプションはエリート主義を制御します。ParetoFraction はパレート フロント上の個体 (エリート メンバー) の数を制限します。DistanceMeasureFcn によって選択された距離関数は、前線上で比較的遠くにいる個体を優先することで、前線上の多様性を維持するのに役立ちます。パレート フロントの動きの尺度である 広がり が小さい場合、アルゴリズムは停止します。詳細については、gamultiobj アルゴリズムを参照してください。
代替機能
アプリ
最適化ライブ エディター タスクが gamultiobj にビジュアル インターフェイスを提供します。
参照
[1] Deb, Kalyanmoy. Multi-Objective Optimization Using Evolutionary Algorithms. Chichester, England: John Wiley & Sons, 2001.
拡張機能
バージョン履歴
R2007b で導入