このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
surrogateopt
時間のかかる目的関数の大域的最小化のためのサロゲート最適化
構文
説明
surrogateopt は、時間のかかる目的関数のグローバル ソルバーです。
surrogateoptは次のような形式の問題を解決しようとします。
ソルバーは、境界、オプションの線形制約、オプションの整数制約、およびオプションの非線形不等式制約に従って、複数の次元で実数値目的関数の大域的最小値を探索します。surrogateopt は、評価に長い時間を要する目的関数に最適です。目的関数は滑らかでない場合があります。ソルバーはすべての変数に対して有限の境界を必要とします。ソルバーは、オプションでチェックポイント ファイルを維持して、クラッシュや部分的な実行からの回復、または停止条件を満たした後の最適化の継続を可能にすることができます。目的関数 f(x) は空 ([]) になる可能性があり、その場合、surrogateopt はすべての制約を満たす点を見つけようとします。
x = surrogateopt(objconstr,lb,ub)lb <= x <= ub 内で objconstr(x) の大域的最小値を探索します。objconstr(x) が構造体を返す場合、surrogateopt は objconstr(x).Ineq <= 0 を条件として objconstr(x).Fval の最小値を探索します。
メモ
追加パラメーターの受け渡し は、必要に応じて目的関数に追加のパラメーターを渡す方法について説明します。
x = surrogateopt(checkpointFile)
x = surrogateopt(checkpointFile,opts)checkpointFile のオプションを opts のオプションに置き換えます。チェックポイントファイルを参照してください。
例
領域 -2.1 <= x(i) <= 2.1 内の 6 つの山を持つキャメル バック関数の最小値を探索します。この関数には、目的関数値が -1.0316284... である 2 つの大域的最小値と、より高い目的関数値を持つ 4 つのローカル最小値があります。
rng default % For reproducibility objconstr = @(x)(4*x(:,1).^2 - 2.1*x(:,1).^4 + x(:,1).^6/3 ... + x(:,1).*x(:,2) - 4*x(:,2).^2 + 4*x(:,2).^4); lb = [-2.1,-2.1]; ub = -lb; x = surrogateopt(objconstr,lb,ub)
surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
x = 1×2
0.0898 -0.7131
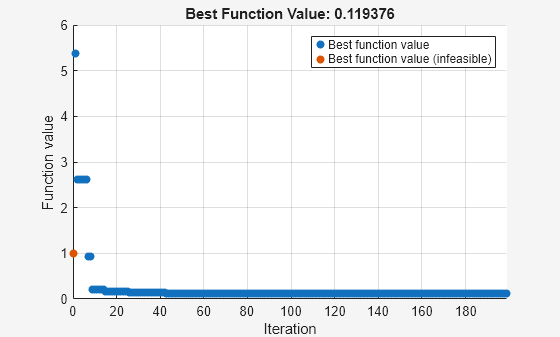
ローゼンブロック関数の最小値を求める
解は点[1/3,1/3]の周りの半径1/3の円板上に存在するという非線形制約に従う。
.
これを行うには、構造体フィールド Fval に Rosenbrock 関数の値を返し、構造体フィールド Ineq に の形式で非線形制約値を返す関数 objconstr (x) を記述します。
type objconstrfunction f = objconstr(x) f.Fval = 100*(x(2) - x(1)^2)^2 + (1 - x(1))^2; f.Ineq = (x(1)-1/3)^2 + (x(2)-1/3)^2 - (1/3)^2;
各コンポーネントの下限を 0、上限を 2/3 にして surrogateopt を呼び出します。
lb = [0,0]; ub = [2/3,2/3]; [x,fval,exitflag] = surrogateopt(@objconstr,lb,ub)
surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
x = 1×2
0.6546 0.4277
fval = 0.1194
exitflag = 0
解における非線形制約の値を確認します。
disp(objconstr(x).Ineq)
9.9334e-04
制約関数の値はゼロに近く、解において制約がアクティブであることを示します。
最初の要素が整数値に制限され、すべての要素が -5 から 5 までの範囲にある 2 次元変数 x の ps_example 関数の最小値を求めます。
intcon = 1; rng default % For reproducibility objconstr = @ps_example; lb = [-5,-5]; ub = [5,5]; x = surrogateopt(objconstr,lb,ub,intcon)
surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
x = 1×2
-5.0000 0.0004
領域 -2.1 <= x(i) <= 2.1 内の 6 つの山を持つキャメル バック関数を最小化します。この関数には、目的関数値が -1.0316284... である 2 つの大域的最小値と、より高い目的関数値を持つ 4 つのローカル最小値があります。
地域を体系的に探索するには、開始点の規則的なグリッドを使用します。関数評価の最大回数を 120 に設定します。'surrogateoptplot' プロット関数を使用します。'surrogateoptplot' プロットを理解するには、surrogateoptplotを解釈する を参照してください。
rng default % For reproducibility objconstr = @(x)(4*x(:,1).^2 - 2.1*x(:,1).^4 + x(:,1).^6/3 ... + x(:,1).*x(:,2) - 4*x(:,2).^2 + 4*x(:,2).^4); lb = [-2.1,-2.1]; ub = -lb; [Xpts,Ypts] = meshgrid(-3:3); startpts = [Xpts(:),Ypts(:)]; options = optimoptions('surrogateopt','PlotFcn','surrogateoptplot',... 'InitialPoints',startpts,'MaxFunctionEvaluations',120); x = surrogateopt(objconstr,lb,ub,options)
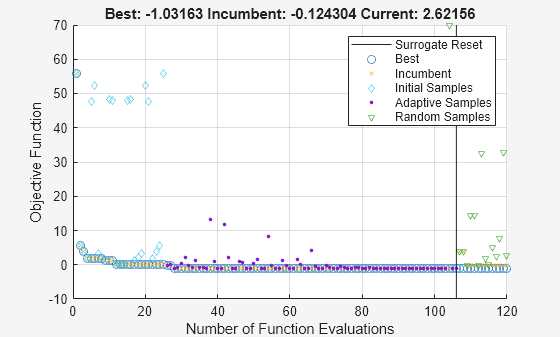
surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
x = 1×2
0.0900 -0.7125
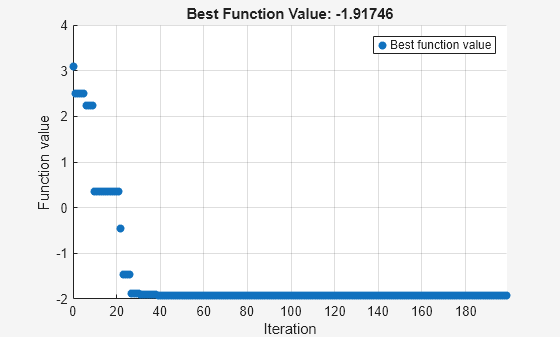
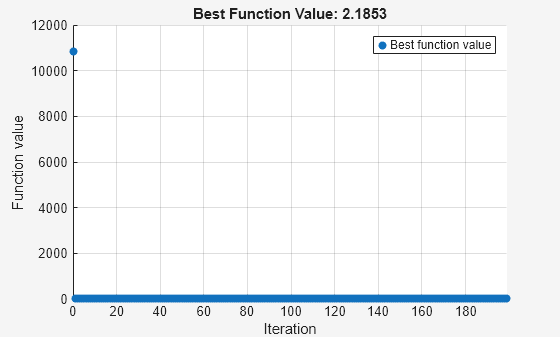
線形不等式制約に従って非線形目的関数を最小化します。200 回の関数評価を最小化します。
objconstr = @multirosenbrock; nvar = 6; lb = -2*ones(nvar,1); ub = -lb; intcon = []; A = ones(1,nvar); b = 3; Aeq = []; beq = []; options = optimoptions('surrogateopt','MaxFunctionEvaluations',200); [sol,fval,exitflag,output] = ... surrogateopt(objconstr,lb,ub,intcon,A,b,Aeq,beq,options)
surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
sol = 1×6
0.2072 0.0437 0.1360 0.0066 0.1196 -0.0002
fval = 2.1853
exitflag = 0
output = struct with fields:
elapsedtime: 30.3115
funccount: 200
constrviolation: 0
ineq: [1×0 double]
rngstate: [1×1 struct]
message: 'surrogateopt stopped because it exceeded the function evaluation limit set by ↵'options.MaxFunctionEvaluations'.'
領域 -2.1 <= x(i) <= 2.1 内の 6 つのこぶを持つキャメルバック関数を表す問題構造を作成します。関数評価の最大回数を 120 に設定します。
rng default % For reproducibility objconstr = @(x)(4*x(:,1).^2 - 2.1*x(:,1).^4 + x(:,1).^6/3 ... + x(:,1).*x(:,2) - 4*x(:,2).^2 + 4*x(:,2).^4); options = optimoptions('surrogateopt','MaxFunctionEvaluations',120); problem = struct('objective',objconstr,... 'lb',[-2.1,-2.1],... 'ub',[2.1,2.1],... 'options',options,... 'solver','surrogateopt'); x = surrogateopt(problem)
surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
x = 1×2
0.0898 -0.7131
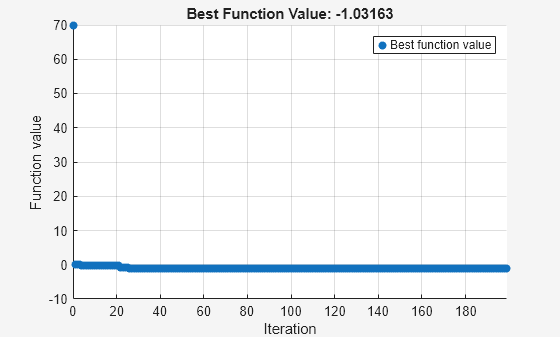
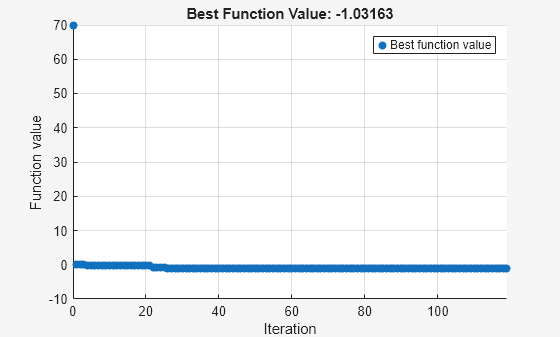
6 つのこぶを持つキャメルバック関数を最小化し、最小化点と目的関数の値の両方を返します。他のすべての表示を抑制するオプションを設定します。
rng default % For reproducibility objconstr = @(x)(4*x(:,1).^2 - 2.1*x(:,1).^4 + x(:,1).^6/3 ... + x(:,1).*x(:,2) - 4*x(:,2).^2 + 4*x(:,2).^4); lb = [-2.1,-2.1]; ub = -lb; options = optimoptions('surrogateopt','Display','off','PlotFcn',[]); [x,fval] = surrogateopt(objconstr,lb,ub,options)
x = 1×2
0.0898 -0.7131
fval = -1.0316
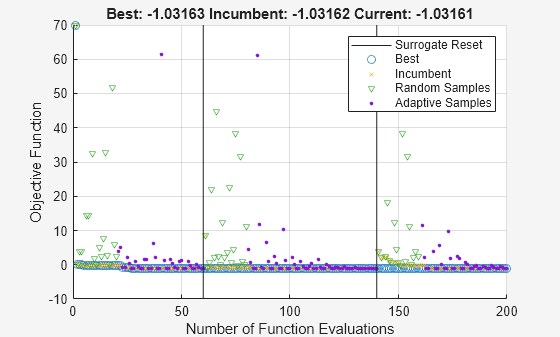
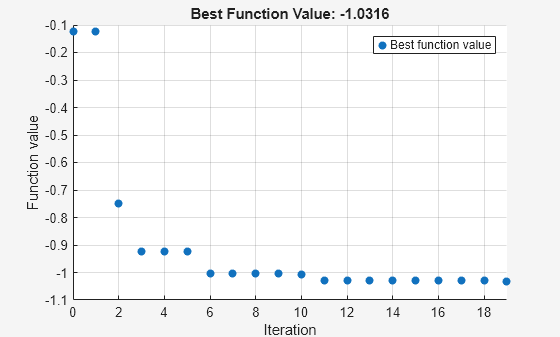
surrogateopt にさらに多くの出力を返すように要求して、サロゲート最適化プロセスを監視します。'surrogateoptplot' プロット関数を使用します。'surrogateoptplot' プロットを理解するには、surrogateoptplotを解釈する を参照してください。
rng default % For reproducibility objconstr = @(x)(4*x(:,1).^2 - 2.1*x(:,1).^4 + x(:,1).^6/3 ... + x(:,1).*x(:,2) - 4*x(:,2).^2 + 4*x(:,2).^4); lb = [-2.1,-2.1]; ub = -lb; options = optimoptions('surrogateopt','PlotFcn','surrogateoptplot'); [x,fval,exitflag,output] = surrogateopt(objconstr,lb,ub,options)
surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
x = 1×2
0.0898 -0.7131
fval = -1.0316
exitflag = 0
output = struct with fields:
elapsedtime: 13.2674
funccount: 200
constrviolation: 0
ineq: [1×0 double]
rngstate: [1×1 struct]
message: 'surrogateopt stopped because it exceeded the function evaluation limit set by ↵'options.MaxFunctionEvaluations'.'
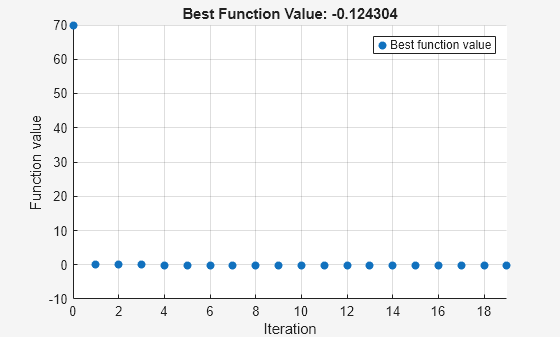
関数評価の最大数を小さく設定することで、サロゲート最適化を迅速に完了します。最適化を再開する可能性に備えて、すべてのソルバーの出力を要求。
rng default % For reproducibility objconstr = @(x)(4*x(:,1).^2 - 2.1*x(:,1).^4 + x(:,1).^6/3 ... + x(:,1).*x(:,2) - 4*x(:,2).^2 + 4*x(:,2).^4); lb = [-2.1,-2.1]; ub = -lb; options = optimoptions('surrogateopt','MaxFunctionEvaluations',20); [x,fval,exitflag,output,trials] = surrogateopt(objconstr,lb,ub,options);
surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
以前評価したポイントから始めて、さらに 20 回の関数評価を最適化します。
options.InitialPoints = trials; [x,fval,exitflag,output,trials] = surrogateopt(objconstr,lb,ub,options);
surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
これら 40 個の関数評価のプロットを 大域的最小値の探索 のプロットと比較すると、サロゲート最適化を再開することは、ソルバーを継続的に実行することと同じではないことがわかります。
クラッシュやその他の理由によりサロゲート最適化を再開できるようにするには、チェックポイント ファイル名を設定します。
opts = optimoptions('surrogateopt','CheckpointFile','checkfile.mat');
最適化問題を作成し、少数の関数評価を設定します。
rng default % For reproducibility objconstr = @(x)(4*x(:,1).^2 - 2.1*x(:,1).^4 + x(:,1).^6/3 ... + x(:,1).*x(:,2) - 4*x(:,2).^2 + 4*x(:,2).^4); lb = [-2.1,-2.1]; ub = -lb; opts.MaxFunctionEvaluations = 30; [x,fval,exitflag,output] = surrogateopt(objconstr,lb,ub,opts)
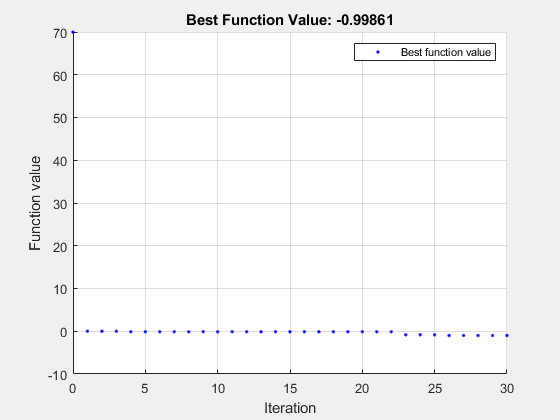
Surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
x = 1×2
0.0067 -0.7343
fval = -0.9986
exitflag = 0
output = struct with fields:
elapsedtime: 28.7221
funccount: 30
constrviolation: 0
ineq: [1×0 double]
rngstate: [1×1 struct]
message: 'Surrogateopt stopped because it exceeded the function evaluation limit set by ↵'options.MaxFunctionEvaluations'.'
オプションを設定して、100 回の関数評価 (すでに実行されたものより 70 回多い) を実行し、最適化を再開します。
opts.MaxFunctionEvaluations = 100;
[x2,fval2,exitflag2,output2] = surrogateopt('checkfile.mat',opts)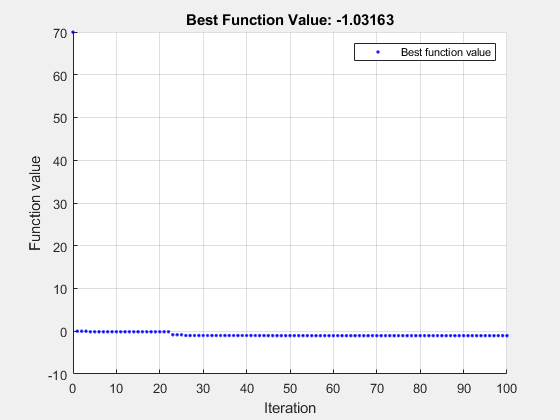
Surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
x2 = 1×2
0.0895 -0.7130
fval2 = -1.0316
exitflag2 = 0
output2 = struct with fields:
elapsedtime: 159.2411
funccount: 100
constrviolation: 0
ineq: [1×0 double]
rngstate: [1×1 struct]
message: 'Surrogateopt stopped because it exceeded the function evaluation limit set by ↵'options.MaxFunctionEvaluations'.'
入力引数
出力引数
アルゴリズム
surrogateopt は次の手順を繰り返し実行します。
境界内で
MinSurrogatePoints個のランダム ポイントをサンプリングして試行ポイントのセットを作成し、試行ポイントで目的関数を評価します。すべてのランダム試行ポイントを通るラジアル基底関数を補間することにより、目的関数のサロゲート モデルを作成します。
サロゲートにいくらかの重みを与え、試行ポイントからの距離にいくらかの重みを与えるメリット関数を作成します。現行ポイント(最後のサロゲート リセット以降に見つかった最良のポイント)の周囲の領域でメリット関数をランダムにサンプリングして、メリット関数の小さな値を見つけます。適応ポイントと呼ばれるこの点を、新しい試行ポイントとして使用します。
適応ポイントで目的を評価し、この点とその値に基づいてサロゲートを更新します。目的関数の値が、以前に観測された最高(最低)値よりも十分に低い場合は「成功」とカウントし、そうでない場合は「失敗」とカウントします。
max(nvar,5)回の失敗の前に 3 回の成功が発生した場合、サンプル分布の分散を上方に更新します。ここで、nvarは次元数です。3 回の成功の前にmax(nvar,5)回の失敗が発生した場合は、分散を下方に更新します。すべての試行ポイントが評価ポイントの
MinSampleDistance以内になるまで、手順 3 から続行します。その時点で、サロゲートからすべての適応ポイントを破棄してサロゲートをリセットし、スケールをリセットして、ステップ 1 に戻り、評価用のMinSurrogatePoints個の新しいランダム試行ポイントを作成します。
詳細は、サロゲート最適化アルゴリズムを参照してください。
代替機能
アプリ
[最適化] ライブ エディター タスクが surrogateopt にビジュアル インターフェイスを提供します。