evaluate
最適化式または問題に含まれる目的関数と制約の評価
説明
evaluate は、ある点における最適化式の数値を求めたり、最適化問題、方程式問題、最適化制約に含まれる目的関数と制約式の一連の点における値を求めたりする場合に使用します。
ヒント
完全なワークフローについては、問題ベースの最適化ワークフローまたは方程式を解くための問題ベースのワークフローを参照してください。
例
2 変数の最適化式を作成します。
x = optimvar("x",3,2); y = optimvar("y",1,2); expr = sum(x,1) - 2*y;
点で式を評価します。
xmat = [3,-1;
0,1;
2,6];
sol.x = xmat;
sol.y = [4,-3];
val = evaluate(expr,sol)val = 1×2
-3 12
2 つの最適化変数 x および y を作成し、それらの変数で 3 行 2 列の制約式を作成します。
x = optimvar("x"); y = optimvar("y"); cons = optimconstr(3,2); cons(1,1) = x^2 + y^2/4 <= 2; cons(1,2) = x^4 - y^4 <= -x^2 - y^2; cons(2,1) = x^2*3 + y^2 <= 2; cons(2,2) = x + y <= 3; cons(3,1) = x*y + x^2 + y^2 <= 5; cons(3,2) = x^3 + y^3 <= 8;
制約式を点 、 で評価します。式 L <= R の値は L - R です。
x0.x = 1; x0.y = -1; val = evaluate(cons,x0)
val = 3×2
-0.7500 2.0000
2.0000 -3.0000
-4.0000 -8.0000
線形計画問題を解きます。
x = optimvar("x"); y = optimvar("y"); prob = optimproblem; prob.Objective = -x -y/3; prob.Constraints.cons1 = x + y <= 2; prob.Constraints.cons2 = x + y/4 <= 1; prob.Constraints.cons3 = x - y <= 2; prob.Constraints.cons4 = x/4 + y >= -1; prob.Constraints.cons5 = x + y >= 1; prob.Constraints.cons6 = -x + y <= 2; sol = solve(prob)
Solving problem using linprog. Optimal solution found.
sol = struct with fields:
x: 0.6667
y: 1.3333
解での目的関数の値を求めます。
val = evaluate(prob.Objective,sol)
val = -1.1111
いくつかの線形制約と非線形制約を含む最適化問題を作成します。
x = optimvar("x"); y = optimvar("y"); obj = (10*(y - x^2))^2 + (1 - x)^2; cons1 = x^2 + y^2 <= 1; cons2 = x + y >= 0; cons3 = y <= sin(x); cons4 = 2*x + 3*y <= 2.5; prob = optimproblem(Objective=obj); prob.Constraints.cons1 = cons1; prob.Constraints.cons2 = cons2; prob.Constraints.cons3 = cons3; prob.Constraints.cons4 = cons4;
100 個のテスト ポイントをランダムに作成します。
rng default % For reproducibility xvals = randn(1,100); yvals = randn(1,100);
点を問題の OptimizationValues オブジェクトに変換します。
pts = optimvalues(prob,x=xvals,y=yvals);
点 pts で目的関数と制約関数を評価します。
val = evaluate(prob,pts);
目的関数の値は val.Objective に格納され、制約関数の値は val.cons1 ~ val.cons4 に格納されます。目的関数の値に 1 を加算した値の対数をプロットします。
figure
plot3(xvals,yvals,log(1 + val.Objective),"bo")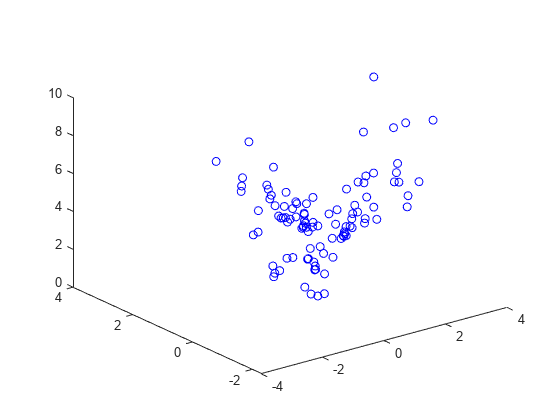
制約 cons1 と cons4 の値をプロットします。制約が満たされるのは、値が非正の数値になる場合であることに注意してください。非正の値を円、正の値を x のマークでプロットします。
neg1 = val.cons1 <= 0; pos1 = val.cons1 > 0; neg4 = val.cons4 <= 0; pos4 = val.cons4 > 0; figure plot3(xvals(neg1),yvals(neg1),val.cons1(neg1),"bo") hold on plot3(xvals(pos1),yvals(pos1),val.cons1(pos1),"rx") plot3(xvals(neg4),yvals(neg4),val.cons4(neg4),"ko") plot3(xvals(pos4),yvals(pos4),val.cons4(pos4),"gx") hold off
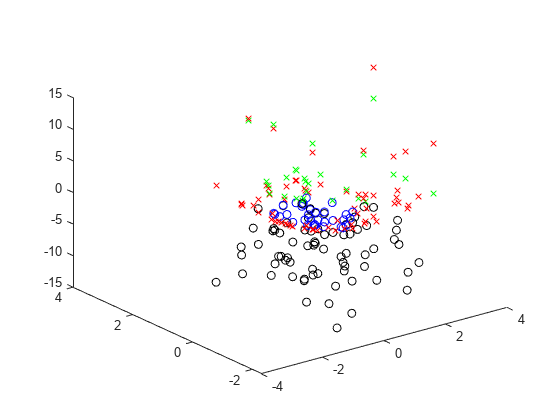
最後の図に示されているように、evaluate では点の値と実行可能性の両方を計算できます。これに対し、issatisfied では実行可能性のみが計算されます。
2 つの最適化変数で一連の方程式を作成します。
x = optimvar("x"); y = optimvar("y"); prob = eqnproblem; prob.Equations.eq1 = x^2 + y^2/4 == 2; prob.Equations.eq2 = x^2/4 + 2*y^2 == 2;
から始めて連立方程式を解きます。
x0.x = 1; x0.y = 1/2; sol = solve(prob,x0)
Solving problem using fsolve. Equation solved. fsolve completed because the vector of function values is near zero as measured by the value of the function tolerance, and the problem appears regular as measured by the gradient. <stopping criteria details>
sol = struct with fields:
x: 1.3440
y: 0.8799
点 x0 と sol で方程式を評価します。
vars = optimvalues(prob,x=[x0.x sol.x],y=[x0.y sol.y]); vals = evaluate(prob,vars)
vals =
1×2 OptimizationValues vector with properties:
Variables properties:
x: [1 1.3440]
y: [0.5000 0.8799]
Equation properties:
eq1: [0.9375 8.4322e-10]
eq2: [1.2500 6.7431e-09]
最初の点 x0 は、eq1 と eq2 の両方の方程式の値が非ゼロです。2 つ目の点 sol は、解に期待されるとおり、それらの方程式の値がほぼゼロになります。
issatisfied を使用して方程式の満足度を調べます。
[satisfied details] = issatisfied(prob,vars)
satisfied = 1×2 logical array
0 1
details =
1×2 OptimizationValues vector with properties:
Variables properties:
x: [1 1]
y: [1 1]
Equation properties:
eq1: [0 1]
eq2: [0 1]
最初の点 x0 は解ではなく、その点の satisfied は 0 です。2 つ目の点 sol は解であり、その点の satisfied は 1 です。方程式のプロパティは、最初の点ではどちらの方程式も満たされず、2 つ目の点では両方が満たされることを示しています。
入力引数
出力引数
詳細
ヒント
ツールボックスには点の実行可能性を計算するための関数が 3 つあります。
infeasibility—OptimizationVariable(その範囲と型の制約を基準とする) またはOptimizationConstraintについて、点における違反の数値を計算します。issatisfied—OptimizationVariableまたはOptimizationConstraint、あるいはOptimizationProblemまたはEquationProblemの成分について、点における実行不可能性が何らかのしきい値を超えているかどうかをチェックします。evaluate—OptimizationVariable、OptimizationExpression、OptimizationConstraint、あるいはOptimizationProblemまたはEquationProblemの成分について、点における値を計算します。