アセンブリ
ボディをジョイント ブロックや拘束ブロックで接続して関節システムに組み立てます。ジョイント ブロックは、接続されたボディ間で許容される回転と並進の最大自由度を決定します。拘束ブロックは、自由度をしばしば連結させる運動的関係を適用して、この数値を減らします。モデルのトポロジに制限はなく、二重振子などの運動学ツリーや 4 節リンクなどの運動学的ループをモデル化できます。
クラス
Simscape ブロック
トピック
ジョイントを使用したボディの組み立て
- Create a Mechanism with Different Joints in MATLAB
This example shows how to model a mechanism that contains different types of joints in MATLAB®. - マルチボディの組み立ての仕組み
ジョイントによるボディの接続、剛体変換を介したジョイント フレームの配置と方向設定、およびジョイントの状態ターゲットの指定によるジョイント アセンブリのガイド。 - マルチボディ組み立てのワークフロー
ボディ サブシステムを連結されたマルチボディ モデルに組み立てるためのワークフローの手順。 - ジョイント接続のモデル化
マルチボディ モデルにおけるジョイントの役割。基本的な自由度をもつジョイント プリミティブのシステムとしてのジョイント。モデルにおけるジョイントの慣性の影響の「見なし」。 - 開ループ連鎖のモデル化
ボディ サブシステムと回転ジョイントの開ループ連鎖への組み立て。 - 閉ループ連鎖のモデル化
ボディ サブシステムと回転ジョイントの閉ループ連鎖への組み立て。 - アセンブリ エラーのトラブルシューティング
Mechanics Explorer と Model Report を使用し、モデルのアセンブリ エラーの特定と修正。
マルチボディの組み立ての制約
- ギア モデルの組み立て
Rigid Transform ブロックを使用して、ギア拘束のアセンブリ要件を満たす方法を学習する。 - 自由度のカウント
Simscape™ 統計ビューアーを使用した、機構における運動の自由度の決定。 - 曲線への点の拘束
Point on Curve Constraint ブロックを使用して、航空機フラップの動きを Spline ブロックで指定された曲線軌跡に制限する。 - 複合歯車列のモデル化
Common Gear Constraint ブロックを使用して、遊星歯車システムを構成するボディの回転運動を組み合わせる。 - ギア拘束のモデル化
単純なギアのモデルを例として使用し、ギア拘束のモデル化方法を学習する。 - Using Limits in Joint Blocks to Constrain Motion
This example uses penalty-based limit forces provided by joint blocks to model three different simple systems.
注目の例
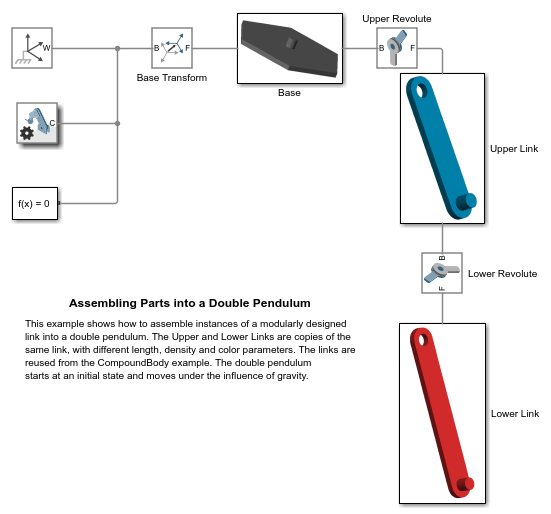
二重振子へのパーツの組み立て
この例では、モジュールとして設計されたリンクのインスタンスを二重振子に組み立てる方法を説明します。Upper Link と Lower Link は同じリンクのコピーで、長さ、密度、色のパラメーターが異なります。これらのリンクは、CompoundBodyExample の例から再利用されています。二重振子は初期状態で開始し、重力の影響下で動きます。
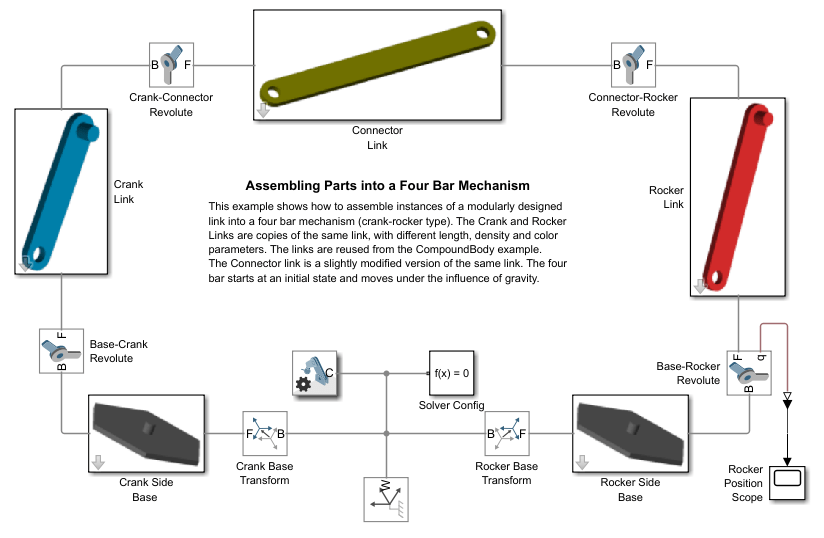
4 節リンク機構のモデル化
詳しい手順に従って 4 節リンク機構をモデル化する方法を学習する。事前構築されたリンク モデルを使用してクランクロッカー機構を組み立て、初期状態を設定し、機構を駆動する方法について確認する。
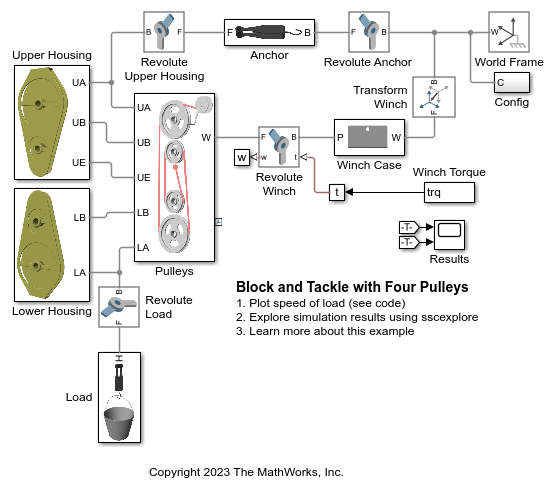
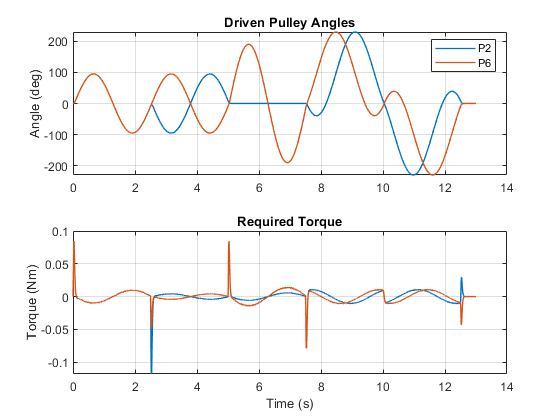
4 個のプーリを使用する滑車装置
この例では、4 個のプーリを使用する滑車装置をモデル化します。ウインチにトルクが加えられると、ウインチがプーリ機構に作用し、荷重を持ち上げます。滑車装置のモデル化には、Simscape™ Multibody™ の Belts and Cables ライブラリのブロックが使用されています。
ケーブル駆動のスライド間テーブル
この例では、ケーブル駆動機構を使用する XY 間位置決めテーブルをモデル化します。1 本のケーブルが 7 つの異なるプーリに巻き付けられ、2 つの入力プーリの回転角度をテーブルの x-y 位置に変換します。
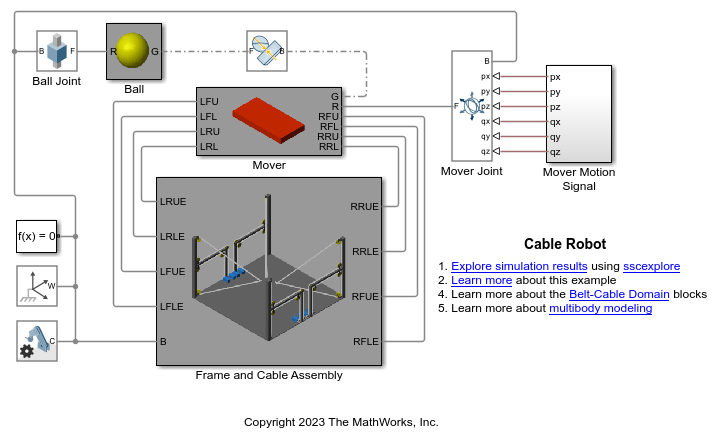
ケーブル ロボット
この例では、ケーブル ロボットをモデル化します。このロボットは、ムーバーの 6 自由度を制御する 8 つの独立したベルト-ケーブル回路で構成されます。機構の中心軸に沿って、一定の高さからボールが落とされます。ムーバーは最初、ボールの真下で運動を開始します。ボールがムーバーに衝突すると弾性で跳ね返るように、ムーバーとボールの間の接触がモデル化されます。ムーバーの目標は、ボールがバウンドするたびに複雑になっていく操作を実行することです。ムーバーは運動によって作動し、必要なケーブル、プーリ、およびモーター スプールの運動学的特性がそこから計算されます。

MATLAB での 4 節リンク マルチボディ機構の作成
この例では、Simscape™ Multibody™ を使用して MATLAB® で 4 節リンク機構を作成します。"simscape.multibody.*" 名前空間の下のさまざまなクラスを示して、MATLAB でマルチボディ システムを構築します。
Simulink でのマルチボディの作成方法
この例では、Simscape™ Multibody™ を使用した機械モデル作成の主な概念と推奨手順を取り上げます。この目的のために簡単な設計問題を選びました。次の節でこの設計問題について、その後の節でそれを解決する方法について説明します。
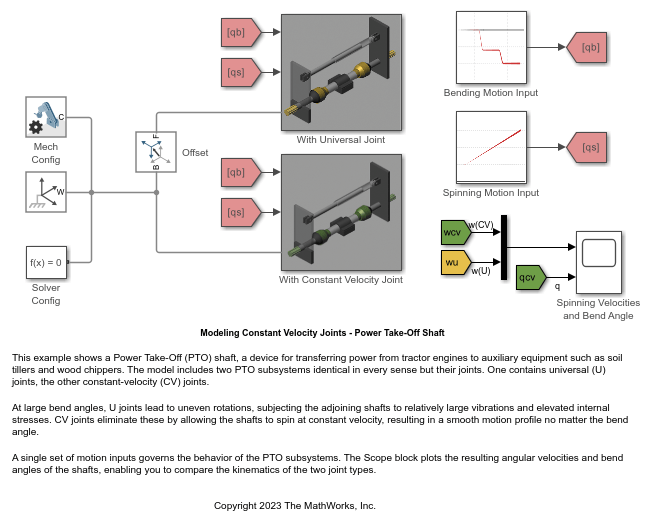
等速ジョイントのモデル化 - パワー テイクオフ シャフト
この例では、パワー テイクオフ (PTO) シャフトを説明します。これは、トラクターのエンジンから、耕耘機やウッド チッパーのような補助装置に動力を伝えるための装置です。モデルには、ジョイント以外のすべての面において同じである 2 つの PTO サブシステムが含まれています。1 つにはユニバーサル (U) ジョイント、もう 1 つには等速 (CV) ジョイントが含まれています。
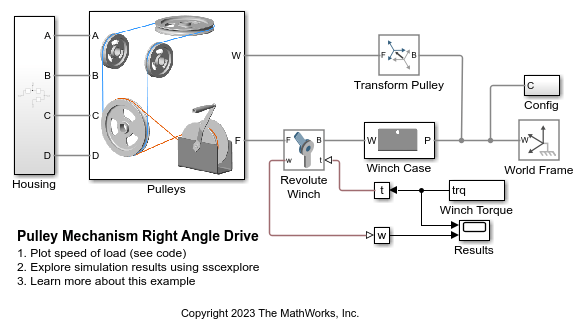
プーリ機構による直角駆動
この例では、ウインチに加えられるトルクを受け、そのウインチに対して 90 度回転した位置にあるプーリに伝達するプーリ機構をモデル化します。この例では、Simscape Multibody の Belts and Cables ライブラリのブロックを使用して、単一の平面にすべては収まらないプーリ機構をモデル化します。
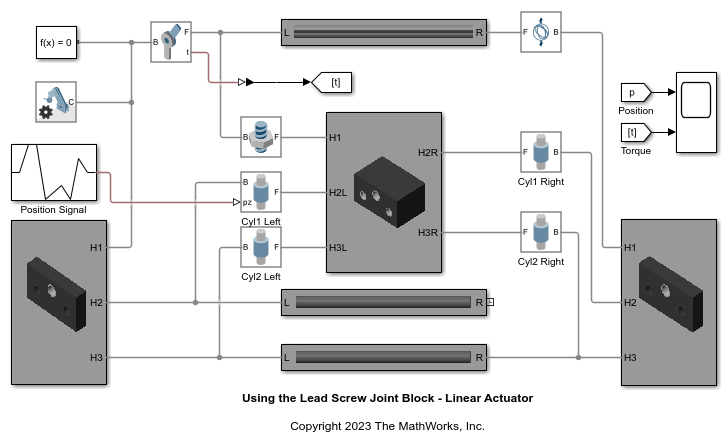
Lead Screw Joint ブロックの使用 - 線形アクチュエータ
この例では、Lead Screw Joint ブロックを使用して線形アクチュエータをモデル化する方法を示します。Lead Screw Joint ブロックは、Revolute Joint ブロックでの回転運動を、4 つの Cylindrical Joint ブロックでの並進運動に変換します。並進運動は、円柱型ジョイントへの運動入力として指定されており、必要なアクチュエータ トルクは、回転ジョイントで自動的に計算されます。
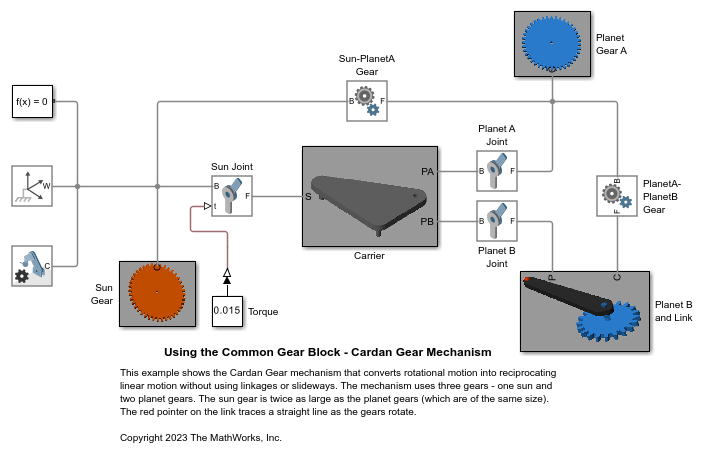
Common Gear ブロックの使用 - カルダン歯車機構
この例では、リンクや滑り面を使用せずに回転運動を線形往復運動に変換するカルダン歯車機構を示します。この機構は、太陽歯車 1 つ、遊星歯車 2 つの、合計 3 つの歯車を使用します。太陽歯車は遊星歯車の 2 倍の大きさで、遊星歯車同士は同じ大きさです。リンクの赤いポインターは、歯車の回転に伴って直線をトレースします。
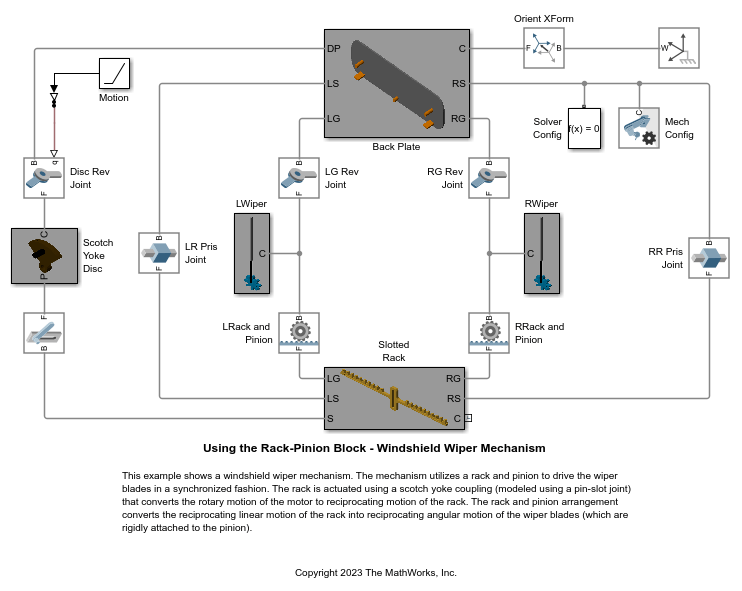
Rack-Pinion ブロックの使用 - ワイパー機構
この例では、ワイパー機構を示します。この機構ではラック アンド ピニオンを使用して、ワイパー ブレードを同期して駆動します。ラックは、スコッチ ヨーク継手 (ピンスロット ジョイントを使用してモデル化) を使用して作動します。この継手により、モーターの回転運動がラックの往復運動に変換されます。ラック アンド ピニオン配置により、ラックの線形往復運動が、ワイパー ブレードの往復角運動に変換されます (ワイパー ブレードはピニオンに剛に接続されています)。
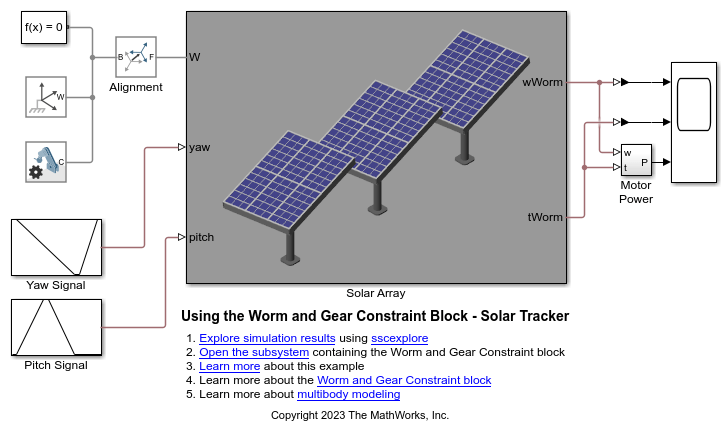
Worm and Gear Constraint ブロックの使用 - 太陽光追尾装置
この例では、Worm and Gear Constraint ブロックを使用して太陽光追尾装置をモデル化する方法を説明します。ウォーム ギア拘束を含む旋回ドライブは、太陽光追尾装置のヨー回転に動力を供給します。ウォーム ギアのジオメトリは、単段のギア装置で大きな減速を与え、高精度のトラッキングと高トルク出力を提供します。ギアの回転ジョイントに運動入力としてヨー回転が指定され、必要なアクチュエータ トルクがウォームの回転ジョイントで自動的に計算されます。
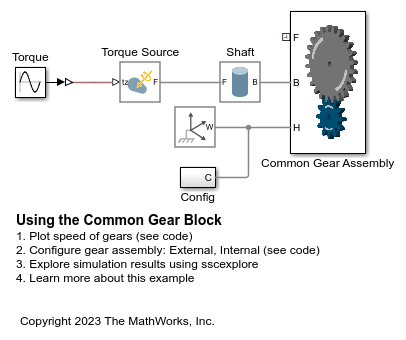
Common Gear ブロックの使用
この例では、平行な軸をもつ 1 対の歯車をモデル化します。アセンブリには 2 つの歯車と、その歯車の対に必要なすべての拘束が含まれています。マスクのパラメーターを調整することにより、アセンブリを構成して、外歯車または内歯車のセットをモデル化できます。
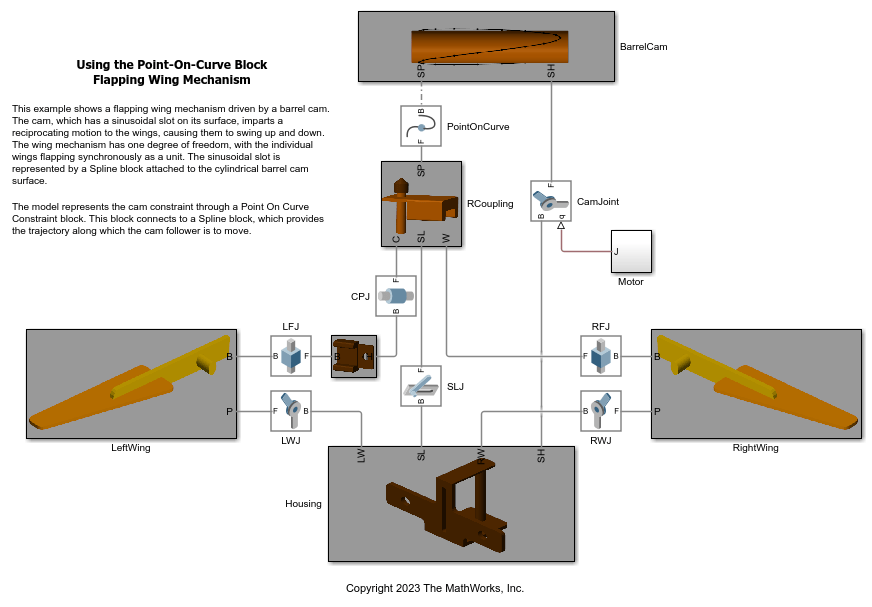
Point-On-Curve ブロックの使用:羽ばたく翼の機構
このモデルでは、筒型カムをベースにした羽ばたく翼の機構のシミュレーションを実行します。これは 1 自由度機構で、2 つの翼は互いに対して同期して羽ばたきます。Spline ブロックと Point On Curve ブロックを使用して筒型カム機構をモデル化し、翼の羽ばたく運動を作動させています。
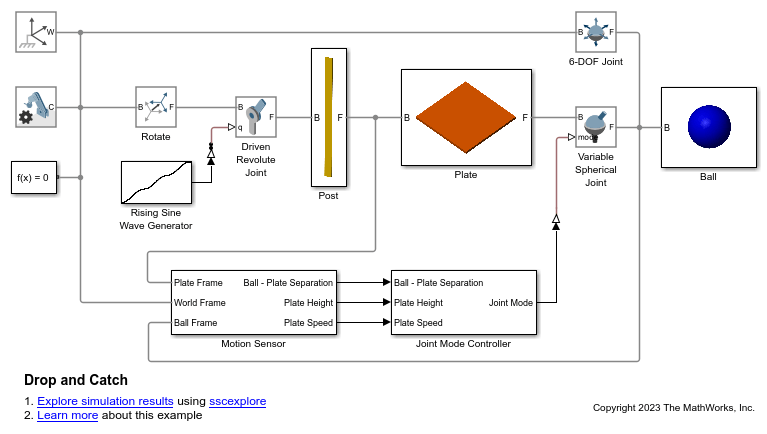
可変モード ジョイント接触 - ドロップ アンド キャッチの機構
この例は、1 サイクルの回転でボールを持ち上げ、ボールを落とし、ボールをキャッチする回転アームを示したものです。
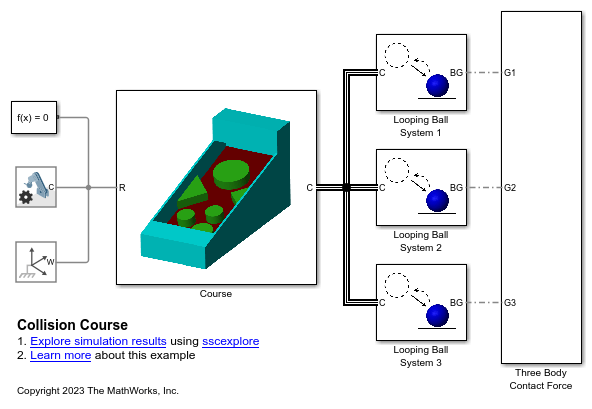
Variable Mode Joint Recirculation - Collision Course
Simulates three balls with trajectories that restart when they reach the bottom of an obstacle course, allowing each of them to traverse the course multiple times per simulation.
MATLAB でのマルチボディ システムの作成方法
この例では、MATLAB® でのマルチボディ システムの作成の主な概念と推奨手順を取り上げます。この目的のために簡単な設計問題を選びました。次の節でこの設計問題について、その後の節でそれを解決する方法について説明します。