Revolute Joint
1 つの回転プリミティブをもつジョイント

ライブラリ:
Simscape /
Multibody /
Joints
説明
Revolute Joint ブロックは、1 つの回転自由度をもつジョイントをモデル化したものです。
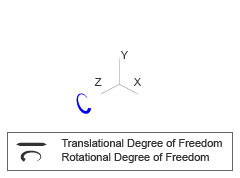
ジョイントの base フレームと follower フレームに接続された 2 つの任意のフレームの動きは、共通の軸を中心とする純粋な回転に拘束されます。回転の軸はジョイントの base フレームの "z" 軸と揃います。図に示すように、base フレームと follower フレームの原点と "z" 軸は共通であり、follower フレームが "z" 軸を中心に回転します。
ジョイント プリミティブの初期状態のターゲットを指定するには、[State Targets] の下にあるパラメーターを使用します。ターゲットは base フレームで指定されます。ターゲットの優先順位レベルも設定できます。ジョイントがすべての状態ターゲットを満たすことができない場合、優先順位レベルに基づいて、どのターゲットを先に満たすか、およびそれらをどの程度正確に満たすかが決まります。例については、マルチボディの組み立ての仕組みの「アセンブリのガイド」セクションを参照してください。
ジョイント プリミティブの減衰とバネの動作をモデル化するには、[Internal Mechanics] の下にあるパラメーターを使用します。エネルギーの散逸をモデル化するには [Damping Coefficient] パラメーターを使用し、エネルギーの蓄積をモデル化するには [Spring Stiffness] パラメーターを使用します。ジョイントのバネはジョイント プリミティブを平衡位置から変位させようとし、ジョイント ダンパーはエネルギー散逸要素として機能します。バネとダンパーは厳密に線形です。
ジョイント プリミティブの範囲を指定するには、[Limits] の下にあるパラメーターを使用します。下限と上限で自由領域の幅を定義します。このブロックは、ジョイントの位置がこの範囲を超えると、ジョイントの位置をこの自由領域に戻すよう加速する力を適用します。このブロックは、平滑化されたバネ-ダンパー手法を使用してその力を計算します。平滑化されたバネ-ダンパー手法の詳細については、Spatial Contact Force ブロックのDescriptionセクションを参照してください。
シミュレーション中のジョイント プリミティブの運動は、[Actuation] セクションの [Force] パラメーター、[Torque] パラメーター、および [Motion] パラメーターによって制御されます。詳細については、ジョイントの作動入力の指定を参照してください。さらに、ジョイント ブロックには位置、速度、加速度、力、トルクなどの検出データを出力する端子があり、これを使用してモデルに対する解析タスクを実行できます。詳細については、検出と力とトルクの検出を参照してください。
ジョイント モード構成を指定するには、[Mode] パラメーターを使用します。詳細については、[Ports] セクションと [Parameters] セクションの [Mode Configuration] を参照してください。
故障
モードの故障を使用すると、シミュレーション中にモデルの設計を変更することなく、ジョイント モードを変更できます。故障挿入により、モードの設定がオーバーライドされます。たとえば、ジョイントの [Mode] パラメーターが Locked に、[故障動作] パラメーターが Disengaged に設定されていると、ジョイントは開放されます。
ジョイント ブロックにモードの故障を追加するには、[Simscape ブロック] タブでジョイント ブロックをクリックし、[Faults] セクションで [Fault] > Add Fault をクリックします。または、ジョイント ブロックをクリックし、省略記号にカーソルを合わせてアクション バーを開き、[ブロックの故障を追加] アイコン  をクリックします。1 つのジョイント ブロックに複数の故障を追加できますが、シミュレーション中にジョイント ブロックに設定できるアクティブな故障は 1 つだけです。
をクリックします。1 つのジョイント ブロックに複数の故障を追加できますが、シミュレーション中にジョイント ブロックに設定できるアクティブな故障は 1 つだけです。
故障を追加する際、Property Inspector の [Fault] セクションで、故障の動作とトリガー タイプを指定します。故障の動作を定義するには、[故障動作] の横にあるリンクをクリックします。このジョイントは、Locked、Normal、または Disengaged モードをサポートしています。ジョイント ブロックは、Always on、Timed、Manual、および Conditional のトリガー タイプをサポートしています。これらのトリガー タイプの詳細については、Set Fault Triggersを参照してください。条件付き故障をトリガーするには、Simulink® 信号、Simscape™ 言語ブロック、および MATLAB® ワークスペース変数を使用できます。ブロックにアクティブな故障を設定するには、故障テーブルを使用します。詳細については、Access the Fault Table and Fault Dashboardを参照してください。
故障のシミュレーションを有効にするには、[Simscape ブロック] タブの [Faults] セクションで、[Fault Simulation] ボタンをオンにします。ボタンが緑で、ステータスが [on] になっている場合、故障のシミュレーションはオンです。シミュレーションではトリガー ステータス データのログを取ります。データを表示するには、シミュレーション データ インスペクターを使用します。また、故障ダッシュボードで、故障のステータスとトリガーされた故障の概要を表示できます。故障ダッシュボードを開くには、[Simscape ブロック] タブで、[Faults] > Fault Dashboard をクリックします。
故障を作成および変更するには、Simscape および Simulink の故障関数を使用することもできます。詳細については、Simulink 故障制御および Simscape の故障インターフェイスの関数セクションを参照してください。
例

Simulink と Simscape Multibody での単振子
この例では、Simulink® 入出力ブロックを使用してモデル化した単振子と、Simscape™ Multibody™ を使用してモデル化した単振子を説明します。ジョイントの初期角度は MATLAB® 変数によって定義されます。Integrator ブロック上の注釈は、ワールド フレームに対するジョイントの初期角度を示します。
端子
フレーム
入力
出力
ジョイント プリミティブの位置を出力する物理量信号端子。この値は、base フレームに対する follower フレームの回転角度です。
依存関係
この端子を有効にするには、[Z Revolute Primitive (Rz)] 、 [Sensing] で [Position] を選択します。
ジョイント プリミティブの位置の 1 階微分を出力する物理量信号端子。
依存関係
この端子を有効にするには、[Z Revolute Primitive (Rz)] 、 [Sensing] で [Velocity] を選択します。
ジョイント プリミティブの位置の 2 階微分を出力する物理量信号端子。
依存関係
この端子を有効にするには、[Z Revolute Primitive (Rz)] 、 [Sensing] で [Acceleration] を選択します。
ジョイント プリミティブに作用するアクチュエータのトルクを出力する物理量信号端子。
依存関係
この端子を有効にするには、[Z Revolute Primitive (Rz)] 、 [Sensing] で [Actuator Torque] を選択します。
下限のトルクを出力する物理量信号端子。ジョイント プリミティブの位置が自由領域の下限を超えると、ブロックはこのトルクを適用します。このトルクはジョイント プリミティブの base フレームと follower フレームの両方に適用され、位置を加速させて自由領域に戻します。
依存関係
この端子を有効にするには、[Z Revolute Primitive (Rz)] 、 [Sensing] で [Lower-Limit Torque] を選択します。
上限のトルクを出力する物理量信号端子。ジョイント プリミティブの位置が自由領域の上限を超えると、ブロックはこのトルクを適用します。このトルクはジョイント プリミティブの base フレームと follower フレームの両方に適用され、位置を加速させて自由領域に戻します。
依存関係
この端子を有効にするには、[Z Revolute Primitive (Rz)] 、 [Sensing] で [Upper-Limit Torque] を選択します。
Composite Force/Torque Sensing
ジョイント全体に作用する拘束力を出力する物理量信号端子。これらの力はジョイントの並進拘束を維持します。出力は 3 行 1 列のベクトル形式で、分解フレームの x、y、z 軸に沿った力成分を表します。詳細については、力とトルクの検出を参照してください。
依存関係
この端子を有効にするには、[Composite Force/Torque Sensing] で [Constraint Force] を選択します。
ジョイント全体に作用する拘束トルクを出力する物理量信号端子。これらのトルクはジョイントの回転拘束を維持します。出力は 3 行 1 列のベクトル形式で、分解フレームの x、y、z 軸方向のトルク成分を表します。
依存関係
この端子を有効にするには、[Composite Force/Torque Sensing] で [Constraint Torque] を選択します。
ジョイント全体に作用する合計力を出力する物理量信号端子。合計力は、接続されたフレーム間でジョイントを通じて伝達されるすべての力の和です。出力は 3 行 1 列のベクトル形式で、分解フレームの x、y、z 軸に沿った力成分を表します。
ジョイントに作用する合計力のデモとして、Prismatic Joint ブロックを使用するモデルを次の図に示します。
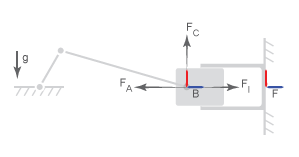
合計力には、アクチュエータの力 (FA)、内力 (FI)、および拘束力 (FC) が含まれます。詳細については、力とトルクの検出を参照してください。
依存関係
この端子を有効にするには、[Composite Force/Torque Sensing] で [Total Force] を選択します。
ジョイント全体に作用する合計トルクを出力する物理量信号端子。合計トルクは、接続されたフレーム間でジョイントを通じて伝達されるすべてのトルクの和です。このトルクには、作動トルク、内部トルク、制限トルク、拘束トルクが含まれます。出力は 3 行 1 列のベクトル形式で、分解フレームの x、y、z 軸方向のトルク成分を表します。詳細については、力とトルクの検出を参照してください。
依存関係
この端子を有効にするには、[Composite Force/Torque Sensing] で [Total Torque] を選択します。