Simulink と Simscape Multibody での単振子
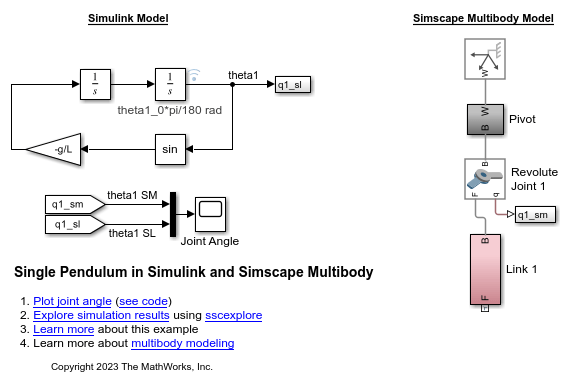
この例では、Simulink® 入出力ブロックを使用してモデル化した単振子と、Simscape™ Multibody™ を使用してモデル化した単振子を説明します。ジョイントの初期角度は MATLAB® 変数によって定義されます。Integrator ブロック上の注釈は、ワールド フレームに対するジョイントの初期角度を示します。
Simulink モデルは信号接続を使用して作成されます。信号接続では、1 つのブロックから別のブロックへのデータの流れを定義します。Simscape Multibody モデルは物理接続を使用して作成されます。物理接続では、エネルギーはコンポーネント間で双方向に流れることが可能です。物理接続を使用すると、コピーして貼り付けるだけで、振子にさらに段階を追加することができます。入出力接続では、方程式の再導出と再実装が必要です。
モデル
Simscape ログからのシミュレーション結果
