マルチボディ ダイナミクス
マルチボディ ダイナミクスとは、ジョイントで接続された複数の剛体や柔軟体で構成される機械システムの動的な挙動の学問です。これらのボディは、加えられた力、トルク、および拘束によって発生する並進運動または回転運動を行います。Simscape™ Multibody™ を使用すると、ロボット、車両、建設機械、航空機着陸装置などの複雑なシステムについて、マルチボディ ダイナミクスのシミュレーションを実行できます。力、トルク、および運動の入力を指定してモデルを駆動し、モデルの動的応答のシミュレーションを実行することができます。
ボディのペアの間に自由度を指定するには、Joints and Constraints ライブラリのブロックを使用します。たとえば、Prismatic Joint ブロックと Revolute Joint ブロックを使用して、スライダークランク機構の直線運動と回転運動をモデル化できます。Point on Curve Constraint ブロックを使用して、ローラー コースターと軌道の間の拘束をモデル化できます。
ボディに作用する力とトルクをモデル化するには、Forces and Torques ライブラリのブロックを使用します。たとえば、Magic Formula Tire Force and Torque ブロックを使用して、タイヤと地面の間の力とトルクをモデル化できます。ロボットが物をつかむような接触問題をモデル化するときには、Spatial Contact Force ブロックを使用して、ボディのペアの間で作用する力のシミュレーションを実行できます。
複数のボディ間の相対運動を測定するには、Transform Sensor ブロックを使用できます。力とトルクを測定するには、Constraints、Joints、および Forces and Torques の各ライブラリのブロックを使用できます。ジョイントにおけるボディの負荷はジョイント ブロックで測定でき、拘束ブロックはボディのペアの間の拘束を維持する力とトルクを検出できます。これらの量のそれぞれが、機械システムのマルチボディ ダイナミクスの解析で重要な不明点を解決するために役立ちます。
クラス
Simscape ブロック
トピック
力、トルクおよび運動の各出力の検出
- さまざまなパラメーター値での運動の解析
さまざまなカプラー リンク長で 4 節リンク機構モデルのシミュレーションを実行し、結果のカプラー曲線をプロット。 - 検出
検出可能な動的変数およびその検出に使用できるブロック。 - Transform Sensor ブロックを使用した運動の検出
Transform Sensor ブロックを使用して、単純なマルチボディ モデルにおけるフレームの運動を検出する。 - ジョイントの拘束力の測定
ジョイント ブロックの検出機能を使用し、機械的リンクに作用する内力の検出。 - ジョイントに作用する力とトルクの測定
ジョイント ブロックの検出機能を使用し、ジョイントに作用する力とトルクの測定。
力、トルクおよび運動の各入力の指定
- 2 つの固体間の接触力のモデル化
Spatial Contact Force ブロックを使用して、固体ブロック間の垂直抗力と摩擦力をモデル化する。 - 斜面を転がり下りる中実円柱
Spatial Contact Force ブロックを使用して、斜面を転がり下りる中実円柱をモデル化する。 - 惑星系における重力のモデル化
Cartesian Joint ブロックと Gravitational Field ブロックを使用して、重力で拘束された自由なボディのシステムを組み立てる。 - 平面マニピュレーター モデルにおけるジョイントの運動の指定
ジョイント ブロックの作動機能を使用し、フレームの軌跡を指定。 - ジョイントの作動トルクの指定
ジョイント ブロックの作動機能を使用し、ジョイントの作動トルクの指定。 - ジョイントのモーション プロファイルの指定
ジョイント ブロックの作動機能を使用し、フレームの軌跡を指定。 - 接触プロキシを使用した接触のシミュレーション
接触プロキシを使用して、接触シミュレーションの速度とロバスト性を高める。
力とトルクの指定
- 物理量信号による作動と検出
物理量信号を使用した作動入力の指定と検出出力の取得。 - ジョイント作動の制限
ジョイント ブロックに運動の作動入力があるモデルについての制限と特別な考慮事項。 - システム ダイナミクスのモデル化と測定
力、トルク、位置、その他の力学的量を設定し検出するためのワークフロー ステップ。 - 重力のモデル化
一様な重力、重力場および個々の重力の影響のモデル化。ボディの境界に対するソフトウェアの定義とその重力トルクへの影響。 - ジョイントの作動入力の指定
ジョイントの作動モード、運動入力の取り扱い、およびモデル アセンブリとシミュレーションの主な違い。
注目の例

バックホー
閉ループ PID 制御をもつ、油圧作動式のバックホーをモデル化します。
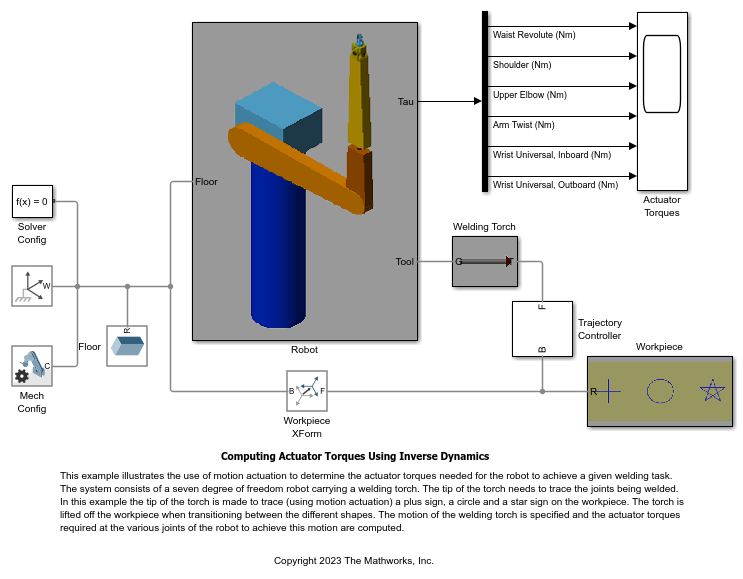
逆動力学を使用したアクチュエータ トルクの計算
この例では、運動作動を使用して、与えられた溶接タスクをロボットが達成するために必要なアクチュエータ トルクを決定する方法を示します。このシステムは、溶接トーチをもつ 7 自由度のロボットからなります。トーチの先端は、溶接するジョイントをなぞる必要があります。この例では、トーチの先端で (運動作動を使用して) 加工物上のプラス記号、円、星印をなぞります。形状から形状へ移動する際には、トーチを持ち上げて加工物から離します。溶接トーチの運動が指定され、ロボットがこの運動を達成するために各種ジョイントで必要とするアクチュエータ トルクが計算されます。

接触のモデル化 - グリッド表面上のボール
この例では、L 型の表面を転がり下りるボールとダンベルを示します。Grid Surface ブロックを使用して L 型膜の生成します。Point Cloud ブロックを使用してボールまたはダンベルと表面の間の接触をモデル化します。点群の密度を変えて点ブロックの数を制御できます。この例では、複雑な形状のボディ間の接触をモデル化できる Grid Surface ブロックと Point Cloud ブロックの機能を示します。

油圧インターフェイス - 油圧シリンダーをもつダンプ トレーラー
この例では、複動式油圧シリンダーによって駆動されるダンプ トレーラーを説明します。シリンダーによって、ダンプ荷台を昇降させるはさみホイスト機構が作動します。このモデルでは、Simscape™ Multibody™ のジョイントを、機械ドメイン端子をもつ Simscape コンポーネントとインターフェイスで接続する方法の例を示します。

スライド カート上の二重倒立振子
この例では、Simscape™ Multibody™ を使用してスライド カートに取り付けられた二重倒立振子をモデル化する方法を説明します。また、コントローラーを使用して直立位置で振子の釣り合いをとる方法についても示します。システムを変更し、青いボックスをクリックしてシステムの線形化モデルを生成してから、シミュレーションを実行します。線形化モデルを使用して制御ゲインが計算されます。線形化モデルからの制御ゲインの計算には、極配置手法が使用されます。コントローラーは、ランダムな外乱力の存在下で、二重振子を垂直に保ちます。詳細については、サポート ファイル linearize.m と controlGains.m を参照してください。

摩擦をもつ親ねじ
この例では、摩擦をもつ親ねじをモデル化します。親ねじの拘束力が測定され、それを使用して親ねじでの摩擦トルクが計算されます。連続スティックスリップ摩擦モデルを使用して、親ねじによって接続されている 2 つの部品の相対回転速度を基に摩擦係数を決定します。

Measure Inertial Properties of Multibody Systems
Measure the inertial properties, such as mass
and center of mass, of a group of bodies or an entire mechanism by using the
Inertia Sensor block.

自動ロック式ウォーム ギア拘束のモデル化 - ウォーム ジャッキ
この例では、自動ロック式のウォーム ギア拘束をモデル化します。このモデルは、ウォームに与えられたトルクで駆動される機械式ジャッキを示しています。モデルに含まれる 2 つの Worm Jack サブシステムは、ウォームのリード角の値を除いてすべて同一です。両方のサブシステムで、摩擦モデルが Worm and Gear Constraint ブロックに適用されています。

Ratchet Pawl Mechanism
Models a ratchet with a locking pawl. The arm pushes the driving pawl to rotate the ratchet wheel. The locking pawl holds the ratchet wheel in place while the arm reverses direction. Planar contact modeling geometry is used to streamline computation.

ラチェット リフター
この例では、ラチェット リフターをモデル化し、複雑なジオメトリが関与する接触問題に接触プロキシを使用する方法を示します。

回転インターフェイス: 電動ブレッド スライサー
このモデルでは、1 自由度の電動ブレッド スライサー機構のシミュレーションを実行します。電気回路とモーターは Simscape™ でモデル化していますが、ブレッド スライサー機構は Simscape Multibody™ でモデル化しています。モデルでは Rotational Multibody Interface ブロックを使用して、Simscape コンポーネントを Multibody の Revolute Joint ブロックに接続します。
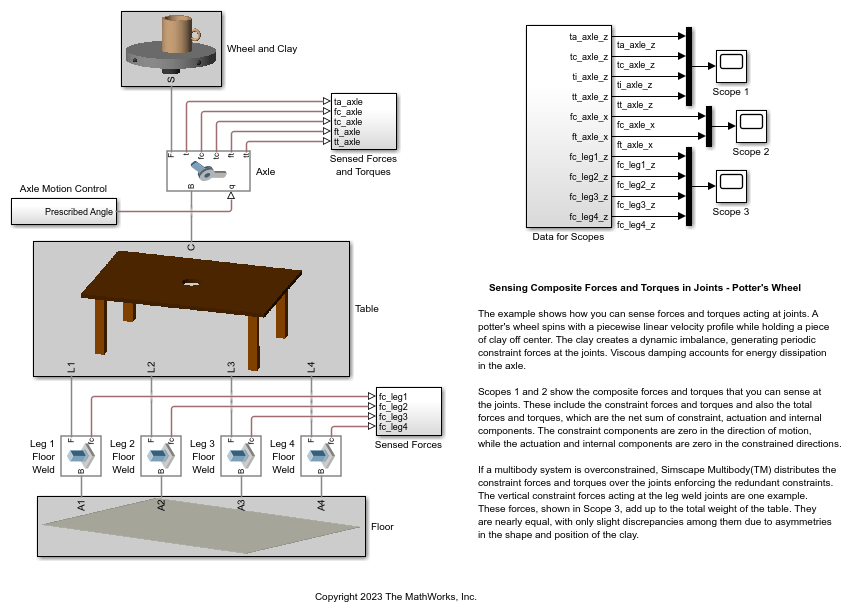
ジョイントでの合成力と合成トルクの検出 - ろくろ
この例では、ジョイントに働く力とトルクを検出する方法を示します。ろくろは、中央からずれた位置で粘土を支えながら、区分線形速度プロファイルで回転します。粘土は動的な不均衡をもたらすため、ジョイントにかかる周期的な拘束力が生じます。粘性減衰は、軸におけるエネルギー散逸を考慮します。

並進インターフェイス:気体圧モデルを使用した星型エンジン
このモデルでは、5 気筒星型エンジンのシミュレーションを実行します。気筒内の圧力のダイナミクスは、Simscape™ Foundation Library の気体ドメインと機械並進ドメインを使用してモデル化されます。3D 機械コンポーネントは、Simscape Multibody™ を使用してモデル化されます。モデルの 1D Simscape パーツと 3D Multibody パーツ間のインターフェイスがどのようにとられているかを確認するには、"Force Model" というブロックのいずれかの内部を確認してください。圧力モデルは、クランク角度に基づいて圧力を適用する、理想化された圧力源です。このモデルは、より現実的な気筒チャンバーの圧力モデルと置き換えることができます。気筒は A、C、E、B、D の順に点火し、クランク回転 144 度ごとに動力工程が発生します。

Spatial Contact Force ブロックの使用 - バンパー カー
この例では、断続的に衝突しながら一連のランプを下って行くおもちゃのバンパー カーについて説明します。Spatial Contact Force ブロックを使用して、シミュレーション中に接触する可能性のある形状のペアごとに、ペア間 (車輪の 1 つとレールの間など) の摩擦力と垂直抗力をモデル化します。各 Spatial Contact Force ブロックは、衝突をモデル化するための短時間で衝撃の大きい接触力と、転がりと滑りをモデル化するための持続的な接触力を生成できます。
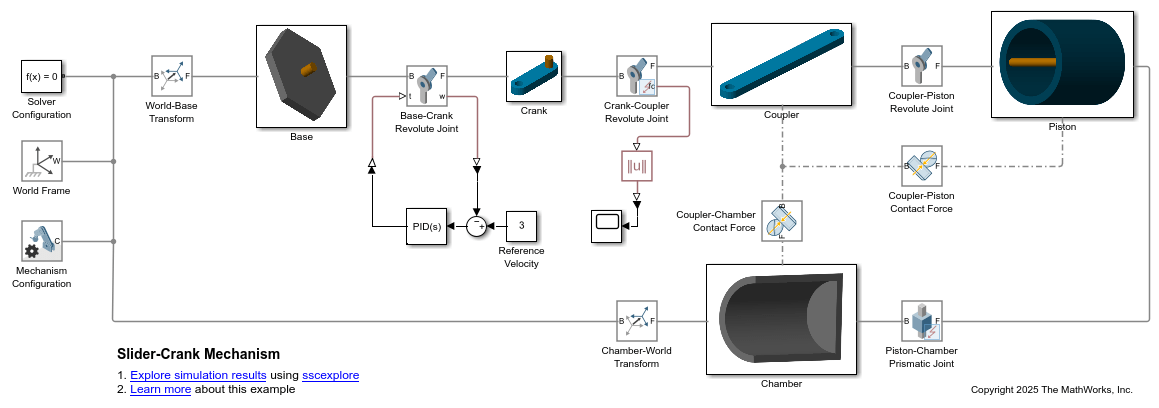
Model Joint Mode Faults - Slider-Crank Mechanism
Demonstrates how to model joint mode faults in a slider-crank mechanism using Simscape™ Multibody™.