システム ダイナミクスのモデル化と測定
マルチボディ システムには、相互接続されたボディのグループが含まれます。Simscape™ Multibody™ を使用して、システムの動的動作を指定し、ジョイントにおける量やジョイントで接続されていないボディ間の量を測定できます。マルチボディ ダイナミクスのシミュレーションの詳細については、マルチボディ ダイナミクスを参照してください。
ジョイントの作動入力の指定

作動させるジョイントと使用する作動のタイプを特定します。次に、作動入力を時変物理量信号としてモデル化し、各種のジョイントに接続します。ジョイントの作動トルクの指定で例を参照してください。
ジョイントの内部の仕組みの指定
ジョイントにおける減衰とバネの動作をモデル化します。エネルギーの散逸をモデル化するためにジョイントの減衰係数を指定し、エネルギーの蓄積をモデル化するためにジョイントのバネ定数を指定します。
ボディの相互作用と外部負荷のモデル化
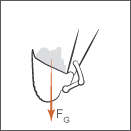
ジョイントで接続されていないボディに対し作用する、またはボディ間で作用する力とトルクを特定します。Forces and Torques ブロックを使用して、これらの力とトルクを明示的にモデル化します。惑星系における重力のモデル化で例を参照してください。
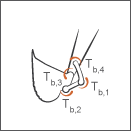
力学的変数の検出

検出する力、トルクおよび運動変数を特定します。ジョイントにおけるこれらの変数は Joint ブロックで検出できます。Transform Sensor ブロックを使用して運動変数を検出することもできます。Transform Sensor ブロックを使用した運動の検出で例を参照してください。