測定フレームの選択
Transform Sensor ブロックを使用すると、ブロックの B および F フレーム端子に接続している 2 つの任意のフレーム間の相対関係を測定することができます。この関係には、相対回転、相対並進、およびそれらの 1 次と 2 次の時間微分が含まれます。これらの測定値は 3 次元ベクトルか、回転行列のような高次元の数量となります。
測定されたベクトルで計算を行うには、ベクトルを座標で表現しなければなりません。[Measurement Frame] パラメーターの設定により、測定されたベクトルをどこに表現するかが決まり、ベクトルは、選択されたフレームの座標で表現されます。たとえば、次の図では、[Measurement Frame] が [World] に設定されているため、Transform Sensor ブロックは並進ベクトル (黒の矢印) をワールド フレームの座標で表現します。

メモ
Transform Sensor ブロックによる回転の測定は、[Measurement Frame] パラメーターとは無関係です。
測定フレーム
[Measurement Frame] パラメーターは、[World]、[Base]、[Follower]、[Non-Rotating Base]、または [Non-Rotating Follower] に設定できます。
World
Transform Sensor ブロックは、測定されたベクトルをワールド フレームを使用して表現し、観察します。例については、Worldを参照してください。
ワールド フレームは慣性フレームです。
[Base] または [Follower]
Transform Sensor ブロックは、測定されたベクトルを選択された base フレームまたは follower フレームを使用して表現し、観察します。
base フレームまたは follower フレームは、それぞれブロックの [B] または [F] 端子に接続するフレームです。base フレームと follower フレームは非慣性フレームです。そのため、base フレームまたは follower フレームで表現されたベクトルには、向心項とコリオリ項が含まれる場合があります。
[Non-Rotating Base] または [Non-Rotating Follower]
Transform Sensor ブロックは、ワールド フレームで表現されたベクトルを、選択したフレーム (非回転 base フレームまたは非回転 follower フレーム) にマッピングします。つまり、このブロックはワールド フレームから現在の base フレームまたは follower フレームへの回転行列を計算し、この行列を、ワールド フレームで表現されたベクトルで乗算します。
非回転 base フレームまたは非回転 follower フレームは、現時点での対応する base フレームまたは follower フレームと同位置で向きの揃った、瞬時的なフレームです。非回転フレームで表現された測定には、向心項とコリオリ項は含まれません。
以下の表では、さまざまな [Measurement Frame] 設定での測定の特性を比較しています。
| 測定フレーム | 標準微分関係 |
|---|---|
| World | あり |
| Base | あり |
| Follower | あり |
| Non-Rotating Base | なし |
| Non-Rotating Follower | なし |
選択したフレームが標準微分関係を満たす場合、このフレームで表現された測定は相互に関連しています。たとえば、[World] を選択した場合、表現された線形加速度ベクトルは、表現された線形速度ベクトル (表現された線形並進ベクトルの時間微分) の時間微分です。
例
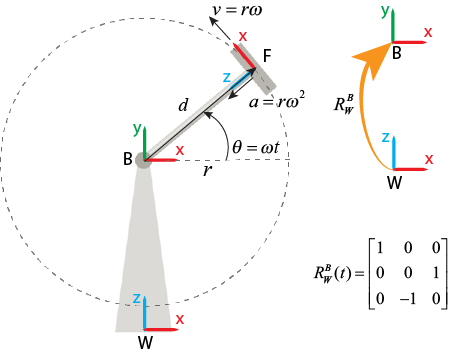
この例では、[Measurement Frame] パラメーターのさまざまな設定での Transform Sensor ブロックの測定を示します。以下の図は、サポート、ハブ、ロッド、カーという 4 つの部分をもつ 1 自由度のシステムを示しています。サポートは地面に固定され、ロッドはハブとカーを接続します。システムの base フレーム、follower フレーム、ワールド フレームは、それぞれハブ、カー、サポートの底面の中心に位置します。ワールド フレームと base フレームは固定のフレームであり、follower フレームはカーと共に移動することに注意してください。

ロッドの長さは で、一定の角速度 で base フレームの Z 軸を中心に回転します。カーとハブの間の相対運動の測定には、Transform Sensor ブロックを使用します。たとえば、このブロックはカーとハブの間の相対的な並進 と回転 を測定します。 は、follower フレームのベクトルを base フレームのベクトルにマッピングします。
次の図はシステムの正面図です。簡単にするために、この例では並進、速度、加速度などの線形測定値を直交座標で表現する方法のみを説明します。

World
[Measurement Frame] を [World] に設定すると、ブロックは follower フレームの運動を base フレームを基準として測定し、その相対運動をワールド フレームを使用して表現し、観察します。
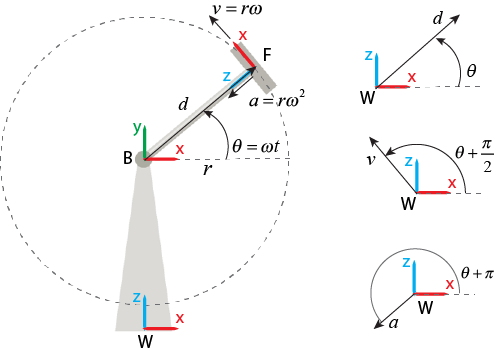
ロッドの長さと回転速度が一定であるため、並進、速度、加速度のベクトルの大きさは一定です。しかし、回転は一定の回転速度 で、ワールド フレームの Y 軸を中心としたものになります。したがって、並進、速度、加速度の各ベクトルは以下として観察できます。
ワールド フレームで表現したベクトルは、常に標準微分関係を満たすことに注意してください。たとえば、 は の時間微分と等しくなります。
[Base] または [Follower]
[Measurement Frame] を [Base] に設定すると、ブロックは follower フレームの相対運動を base フレームを基準として測定し、その相対運動を base フレームを使用して表現し、観察します。
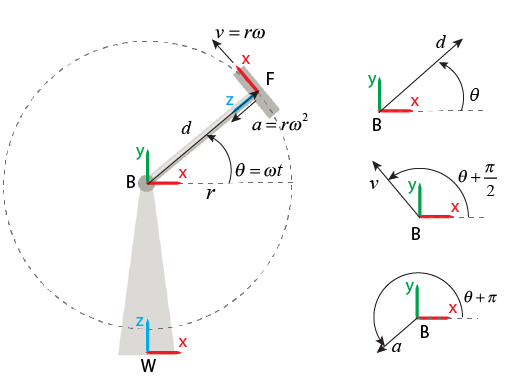
この例では base フレームは固定されているため、測定値は以下として観察できます。
[Measurement Frame] を [Follower] に設定すると、ブロックは follower フレームの相対運動を base フレームに対して測定し、その相対運動を follower フレームを使用して表現し、観察します。follower フレームは時間とともに回転するため、表現されたベクトルには向心項とコリオリ項が含まれます。follower フレームに属する観察者から見ると、base フレームの原点はまったく動きません。そのため、base フレームと follower フレームの間のオフセットは一定であり、相対的な線形速度と線形加速度はゼロになります。

base フレームと follower フレームで表現されたベクトルは、常に標準微分関係を満たすことに注意してください。たとえば、 は の時間微分と等しくなります。
[Non-Rotating Base] または [Non-Rotating Follower]
[Measurement Frame] を [Non-Rotating Base] に設定すると、ブロックは、ワールド フレームで表現されたベクトルを、現時点で base フレームと同位置で向きの揃った瞬時的なフレームにマッピングします。
[Measurement Frame] を [Non-Rotating Follower] に設定すると、ブロックは、ワールド フレームで表現されたベクトルを、現時点で follower フレームと同位置で向きの揃った瞬時的なフレームにマッピングします。

base フレームまたは follower フレームが固定されていない場合、対応する非回転フレームでの測定値は標準微分関係を満たしません。たとえば、follower フレームが回転しているため、[Measurement Frame] を [Non-Rotating Follower] に設定した場合、表現された速度ベクトルは表現された並進ベクトルの時間微分ではありません。