回転の測定
回転検出の概要
フレームの回転は各種の形式で測定できます。これらには軸角度、四元数、変換、回転シーケンスが含まれます。各種の形式は、Transform Sensor ブロックを介して利用できます。また、限定的ながらジョイント ブロックでも利用できます。選択する測定形式はモデルによって異なります。用途に最適な形式を選択してください。
回転の測定
回転は相対量です。1 つのフレームの回転は、別のフレームに対してのみ意味があります。したがって、回転検出機能をもつブロックで測定を実行するには、測定フレームと基準フレームの 2 つのフレームが必要です。このようなブロックでは、follower フレーム端子が測定フレームを特定し、base フレーム端子が測定の基準フレームを特定します。
Simscape™ Multibody™ は、標準的な規則に従って回転形式を定義します。場合によっては、複数の規則が存在します。これは、四元数の場合などに当てはまります。回転の測定を正しく解釈するには、回転形式の定義を見直してください。
軸角度測定
軸角度は、比較的単純な測定形式です。この形式では、軸ベクトルと角度という 2 つのパラメーターを使用して回転を完全に表します。軸角度形式の有用性は、オイラーの回転定理から直接導かれます。この定理によると、3 次元回転または回転シーケンスは、固定された 1 つの軸の周りを回る、純粋な回転として表すことができます。

フレームの回転を軸角度形式で測定するには、Transform Sensor ブロックを使用します。ブロックのプロパティ インスペクターには、別々に [Axis] パラメーターと [Angle] パラメーターがあり、これらを選択することによって、対応する物理量信号 (PS) 端子 (それぞれ axs と q というラベル) を表示できます。軸と角度のパラメーターは独立して表示されるため、軸、角度またはその両方の測定を選択できます。
軸の出力は、[ax, ay, az] という形式の 3 次元単位ベクトルです。この単位ベクトルは、回転方向を右手の法則に従って符号化します。たとえば、+X 軸の周りを反時計方向に回るフレームの回転軸は [1 0 0] です。同じ軸の周りを時計方向に回るフレームの回転軸は [-1 0 0] です。
角度出力は、範囲 0 ~ π のスカラーの数値です。この数値は、測定軸の周りを回転する範囲を符号化します。既定では、角度はラジアン単位で測定されます。角度単位は、Simulink® ブロックとのインターフェイスに使用されている PS-Simulink Converter ブロックで変更できます。
四元数の測定
四元数は、多元数に基づく回転の表現です。四元数は、スカラー部分 S とベクトル部分 V で構成されています。スカラー部分は回転の角度を符号化し、ベクトル部分は回転軸を符号化します。
四元数の主な利点は、特異点のないパラメーター空間です。オイラー角のシーケンスに存在する数学的特異点は、回転自由度の喪失につながります。この現象は、ジンバル ロックとして知られています。Simscape Multibody では、ジンバル ロックは数値誤差を発生させ、シミュレーションの失敗の原因になります。特異点が存在しないということは、シミュレーション目的には四元数がよりロバストであることを意味します。
フレームの回転を四元数形式で測定するには、次を使用します。
A Transform Sensor ブロック (2 つの一般的なフレーム間の回転を測定する場合)。プロパティ インスペクターの [Rotation] メニューには [Quaternion] パラメーターがあり、これを選択することによって、対応する物理量信号端子 ([Q] というラベル) を表示できます。
球面プリミティブをもつジョイント ブロック (2 つのジョイント フレーム間の 3 次元回転を測定する場合)。プロパティ インスペクターの [Sensing] メニューには [Position] パラメーターがあり、これを選択することによって、対応する物理量信号端子 (これも [Q] というラベル) を表示できます。詳細については、Spherical Joint ブロックのリファレンス ページを参照してください。
四元数出力は、4 要素の行ベクトル です。ここで、
および
θ は回転の角度であり、[Ux, Uy, Uz] は回転軸の単位ベクトルです。任意の回転に対して、2 つの四元数があることに注意してください。それらは互いに逆向きですが、同じ回転を表します。たとえば、四元数 [1 0 0 0] と [-1 0 0 0] は、いずれも恒等回転を表します。
変換の測定
回転変換は、フレームの回転を符号化する 3×3 行列です。base フレームの軸 [x, y, z]B に関して、follower フレームの軸 [x, y, z]F は次の関係にあります。
それぞれの行列の列には、base フレームで表現される、follower フレームの軸の座標が含まれます。たとえば、最初の列は、follower フレームの x 軸を base フレーム内で表現した座標を示します。同様に、2 番目と 3 番目の列には、y 軸と z 軸の座標がそれぞれ含まれます。回転行列を使用したベクトル操作では、ベクトルの座標が、follower フレームから base フレームに変換されます。
Transform Sensor ブロックを使用して、フレームの回転を回転行列として検出できます。このブロックのプロパティ インスペクターには [Transform] オプションがあり、これを選択すると、R というラベルの付いた物理量信号端子が表示されます。この端子を使用して回転行列信号を出力し、PS-Simulink Converter ブロックでその出力物理量信号を Simulink 信号に変換した後、Simulink サブシステムで処理や解析などを行います。
回転シーケンスの測定
回転シーケンスの測定では、フレームの軸を中心とする 3 つの連続した基本回転を使用して 2 つのフレーム間の向きの違いを表します。回転シーケンスの測定を使用するには、sequenceAngles メソッドまたは Transform Sensor ブロックの [Rotation Sequence] パラメーターを使用します。
基本回転は、各基本回転の後にその向きが変わる中間フレームを中心とする場合は内因性となります。基本回転の中心が固定のフレームの場合は外因性の回転となります。測定には、X-Y-X、X-Y-Z、X-Z-X、X-Z-Y、Y-X-Y、Y-X-Z、Y-Z-X、Y-Z-Y、Z-X-Y、Z-X-Z、Z-Y-X、および Z-Y-Z の 12 種類の回転シーケンスがあります。Transform Sensor ブロックの端子 seq からの出力は内因性回転の角度であることに注意してください。Z-Y-Z シーケンスに基づく 3 つの内因性回転をもつ 3 次元回転を表す例を図に示します。
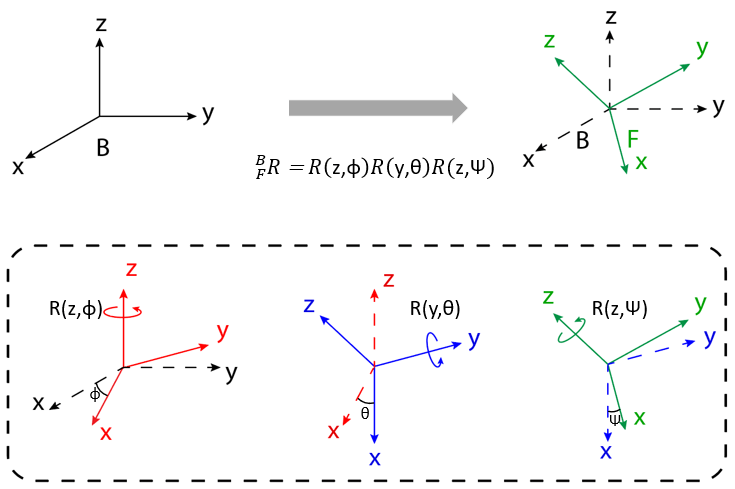
外因性回転は同じ角度の内因性回転と等価ですが、シーケンスの順序が逆です。たとえば、角度 φ、θ、Ψ による外因性回転 Z-Y-X は、角度 Ψ、θ、φ による内因性回転 X-Y-Z と等価です。
回転にジンバル ロックなどのロックの問題がなければ、回転シーケンスの測定には 2 セットの解が存在しますが、Transform Sensor ブロックまたは sequenceAngles メソッドではそのうちの 1 セットのみが出力されます。3 つの角度の範囲はいずれも [-π, π] です。X-Y-Z や Z-X-Y のように、回転シーケンスの文字が異なる場合は、2 番目の回転角度の範囲が (-π/2, π/2) になります。X-Y-X や Z-Y-Z のように、回転シーケンスの最初と最後の文字が同じ場合は、2 番目の回転角度の範囲が (0, π) になります。
次の場合はロックの問題が発生し、最初と最後の回転角度の解が無限に存在します。
回転シーケンスの文字が異なり、2 番目の回転角度が-π/2 または π/2 に等しい。
回転シーケンスの最初と最後の文字が同じで、2 番目の回転角度が 0 または π に等しい。
これらの場合、Transform Sensor ブロックまたは sequenceAngles メソッドは、最初と最後の角度の大きさが同じである 1 セットの解のみを出力します。