Weld Joint
プリミティブがゼロのジョイント

ライブラリ:
Simscape /
Multibody /
Joints
説明
このブロックは、自由度 0 のジョイントを表します。ジョイント プリミティブはありません。base フレームと follower フレームは、それぞれ別の剛体に接続され、常に同位置になります。このブロックのダイアログ ボックスには、拘束および合計の力とトルクを検出するオプションがあります。
ジョイントの自由度

故障
モードの故障を使用すると、シミュレーション中にモデルの設計を変更することなく、ジョイント モードを変更できます。故障挿入により、モードの設定がオーバーライドされます。たとえば、ジョイントの [Mode] パラメーターが Locked に、[故障動作] パラメーターが Disengaged に設定されていると、ジョイントは開放されます。
ジョイント ブロックにモードの故障を追加するには、[Simscape ブロック] タブでジョイント ブロックをクリックし、[Faults] セクションで [Fault] > Add Fault をクリックします。または、ジョイント ブロックをクリックし、省略記号にカーソルを合わせてアクション バーを開き、[ブロックの故障を追加] アイコン  をクリックします。1 つのジョイント ブロックに複数の故障を追加できますが、シミュレーション中にジョイント ブロックに設定できるアクティブな故障は 1 つだけです。
をクリックします。1 つのジョイント ブロックに複数の故障を追加できますが、シミュレーション中にジョイント ブロックに設定できるアクティブな故障は 1 つだけです。
故障を追加する際、Property Inspector の [Fault] セクションで、故障の動作とトリガー タイプを指定します。故障の動作を定義するには、[故障動作] の横にあるリンクをクリックします。このジョイントは、Normal モードまたは Disengaged モードをサポートしています。ジョイント ブロックは、Always on、Timed、Manual、および Conditional のトリガー タイプをサポートしています。これらのトリガー タイプの詳細については、Set Fault Triggersを参照してください。条件付き故障をトリガーするには、Simulink 信号、Simscape 言語ブロック、および MATLAB ワークスペース変数を使用できます。ブロックにアクティブな故障を設定するには、故障テーブルを使用します。詳細については、Access the Fault Table and Fault Dashboardを参照してください。
故障のシミュレーションを有効にするには、[Simscape ブロック] タブの [Faults] セクションで、[Fault Simulation] ボタンをオンにします。ボタンが緑で、ステータスが [on] になっている場合、故障のシミュレーションはオンです。シミュレーションではトリガー ステータス データのログを取ります。データを表示するには、シミュレーション データ インスペクターを使用します。また、故障ダッシュボードで、故障のステータスとトリガーされた故障の概要を表示できます。故障ダッシュボードを開くには、[Simscape ブロック] タブで、[Faults] > Fault Dashboard をクリックします。
故障を作成および変更するには、Simscape™ および Simulink® の故障関数を使用することもできます。詳細については、Simulink 故障制御および Simscape の故障インターフェイスの関数セクションを参照してください。
端子
フレーム
入力
出力
Composite Force/Torque Sensing
ジョイント全体に作用する拘束力を出力する物理量信号端子。これらの力はジョイントの並進拘束を維持します。出力は 3 行 1 列のベクトル形式で、分解フレームの x、y、z 軸に沿った力成分を表します。詳細については、力とトルクの検出を参照してください。
依存関係
この端子を有効にするには、[Composite Force/Torque Sensing] で [Constraint Force] を選択します。
ジョイント全体に作用する拘束トルクを出力する物理量信号端子。これらのトルクはジョイントの回転拘束を維持します。出力は 3 行 1 列のベクトル形式で、分解フレームの x、y、z 軸方向のトルク成分を表します。
依存関係
この端子を有効にするには、[Composite Force/Torque Sensing] で [Constraint Torque] を選択します。
ジョイント全体に作用する合計力を出力する物理量信号端子。合計力は、接続されたフレーム間でジョイントを通じて伝達されるすべての力の和です。出力は 3 行 1 列のベクトル形式で、分解フレームの x、y、z 軸に沿った力成分を表します。
ジョイントに作用する合計力のデモとして、Prismatic Joint ブロックを使用するモデルを次の図に示します。
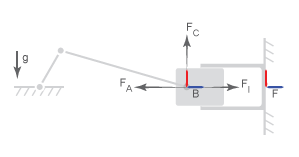
合計力には、アクチュエータの力 (FA)、内力 (FI)、および拘束力 (FC) が含まれます。詳細については、力とトルクの検出を参照してください。
依存関係
この端子を有効にするには、[Composite Force/Torque Sensing] で [Total Force] を選択します。
ジョイント全体に作用する合計トルクを出力する物理量信号端子。合計トルクは、接続されたフレーム間でジョイントを通じて伝達されるすべてのトルクの和です。このトルクには、作動トルク、内部トルク、制限トルク、拘束トルクが含まれます。出力は 3 行 1 列のベクトル形式で、分解フレームの x、y、z 軸方向のトルク成分を表します。詳細については、力とトルクの検出を参照してください。
依存関係
この端子を有効にするには、[Composite Force/Torque Sensing] で [Total Torque] を選択します。