Rigid Transform
フレーム間の固定された空間関係

ライブラリ:
Simscape /
Multibody /
Frames and Transforms
説明
Rigid Transform ブロックは、シミュレーション中の 2 つのフレーム間の固定された空間関係を指定して維持します。空間関係には並進と回転を含めることができます。
このブロックには、base フレームに対する follower フレームの位置と向きを指定するためのさまざまな方法があります。詳細については、RotationとTranslationを参照してください。
例
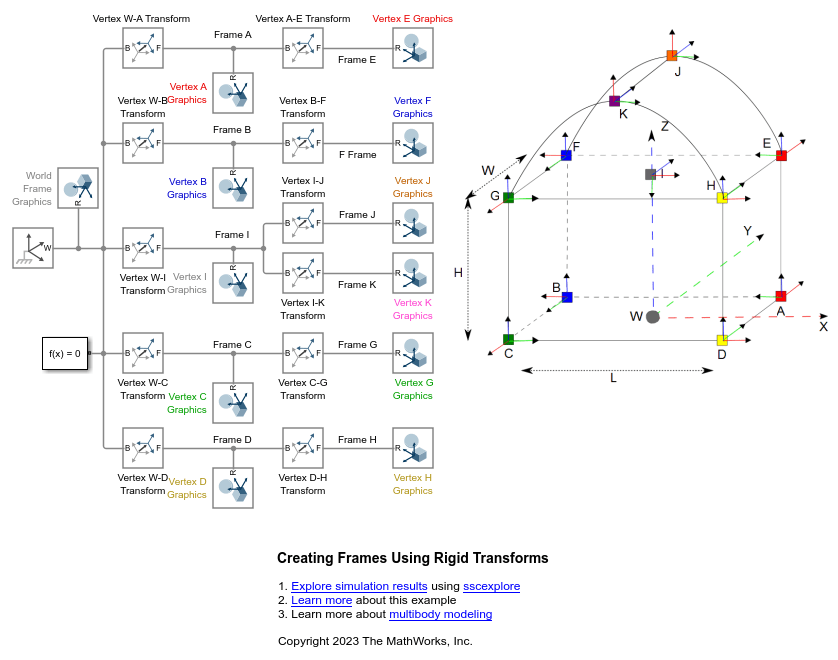
Rigid Transform を使用したフレームの作成
この例では、座標フレームの、接続ラインおよびフレーム端子との対応を示します。同一でないフレームを剛性的に関連付ける基礎的な手法としての Rigid Transform ブロックに焦点を当てています。ネットワークの基準フレームはワールド フレームで、立方体の底面中央にあります。その他に、立方体の頂点に 8 つ、上面の中央に 1 つ、上部の曲面部分に 2 つのフレームがあります。
端子
フレーム
変換を指定する基準となるフレーム。
変換を適用するフレーム。
パラメーター
Rotation
base フレームと follower フレームの間の相対回転を指定するために使用する方法。base フレームと follower フレームを同じ向きに拘束するには、パラメーターを [None] に設定します。
[Pair 1: Base] パラメーターで設定される base フレームの軸に揃えるために使用される follower フレームの軸。follower フレームの直交軸として指定します。follower フレームは base フレームを基準にして回転し、base フレームと follower フレームの選択した座標軸間の配置を有効にします。
依存関係
このパラメーターを有効にするには、[Rotation] で、[Method] パラメーターを [Aligned Axis] に設定します。
[Pair 1: Follower] で指定される follower フレームに揃える base フレームの軸。base フレームの直交軸として指定します。
依存関係
このパラメーターを有効にするには、[Rotation] で、[Method] パラメーターを [Aligned Axis] に設定します。
[Pair 2: Follower] で指定される follower フレームに揃える base フレームの軸。follower フレームの直交軸として指定します。follower フレームは base フレームを基準にして回転し、base フレームと follower フレームの選択した座標軸間の配置を有効にします。
依存関係
このパラメーターを有効にするには、[Rotation] で、[Method] パラメーターを [Aligned Axis] に設定します。
[Pair2: Follower] パラメーターで設定される follower フレームの軸を揃えるために使用される base フレームの軸。base フレームの直交軸として指定します。[Pair 2] の軸の選択肢は [Pair 1] での軸の選択によって異なります。
依存関係
このパラメーターを有効にするには、[Rotation] で、[Method] パラメーターを [Aligned Axis] に設定します。
相対回転の軸。base フレームの直交軸として指定します。
依存関係
このパラメーターを有効にするには、[Rotation] で、[Method] パラメーターを [Standard Axis] に設定します。
相対回転の角度。スカラーとして指定します。この角度は、指定された軸を中心とした、base フレームに対する follower フレームの回転を示します。
依存関係
このパラメーターを有効にするには、[Rotation] で、[Method] パラメーターを [Standard Axis] に設定します。
相対回転の軸。3 行 1 列の単位ベクトルとして指定します。ベクトルは無次元で、base フレームで分解される回転軸を示します。
依存関係
このパラメーターを有効にするには、[Rotation] で、[Method] パラメーターを [Arbitrary Axis] に設定します。
相対回転の角度。スカラーとして指定します。この角度は、[Axis] パラメーターで指定された軸を中心とした、base フレームに対する follower フレームの回転を示します。
依存関係
このパラメーターを有効にするには、[Rotation] で、[Method] パラメーターを [Arbitrary Axis] に設定します。
follower フレームを回転させる軸のフレーム。[Follower Axes] または [Base Axes] として指定します。このパラメーターを [Follower Axes] に設定すると、follower フレームは自身の軸を中心に回転し、後続の各回転で follower フレームの向きが変わります。このパラメーターを [Base Axes] に設定すると、固定の base フレームの軸を中心に follower フレームが回転します。詳細については、回転の測定を参照してください。
依存関係
このパラメーターを有効にするには、[Rotation] で、[Method] パラメーターを [Rotation Sequence] に設定します。
連続する 3 つの基本回転に対する回転軸のシーケンス。詳細については、回転シーケンスの測定を参照してください。
依存関係
このパラメーターを有効にするには、[Rotation] で、[Method] パラメーターを [Rotation Sequence] に設定します。
基本回転の角度。3 行 1 列のベクトルとして指定します。詳細については、回転シーケンスの測定を参照してください。
依存関係
このパラメーターを有効にするには、[Rotation] で、[Method] パラメーターを [Rotation Sequence] に設定します。
相対回転。3 行 3 列の行列として指定します。この行列は直交でなければならず、行列式は 1 でなければなりません。詳細については、回転の測定を参照してください。
依存関係
このパラメーターを有効にするには、[Rotation] で、[Method] パラメーターを [Rotation Matrix] に設定します。
相対回転。四元数のパラメーター化のベクトルとして指定します。四元数の詳細については、回転の測定を参照してください。
依存関係
このパラメーターを有効にするには、[Rotation] で、[Method] パラメーターを [Quaternion] に設定します。
Translation
base フレームと follower フレームの間の相対並進を指定するために使用する方法。次の表は使用可能なオプションをまとめたものです。
| 方法 | 説明 |
|---|---|
None | base フレームと follower フレームを同位置にします。この方法にはパラメーターは必要ありません。 |
Cartesian | 直交座標で 3 次元並進を指定します。 |
Standard Axis | x、y、または z 軸に沿った 1 次元並進を指定します。 |
Cylindrical | 円柱座標で 3 次元並進を指定します。 |
Cartesian Axisbase フレームに対する follower フレームの [Offset] を指定します。これは、base フレームを follower フレームと同位置にする 3 次元並進ベクトルです。物理単位を選択または入力します。
Standard Axisbase フレームの x、y、または z 軸に沿った base フレームに対する follower フレームのオフセットを指定します。物理単位を選択または入力します。
パラメーター 説明 Axis follower フレームを並進させる軸 Offset 指定した軸に沿った base フレームを基準とする follower フレームの並進 Cylindricalbase フレームを follower フレームと同位置にする並進を円柱座標で指定します。物理単位を選択または入力します。
パラメーター 説明 Radius follower フレームの原点と base フレームの z 軸の間の距離。これは円柱の半径の座標です。 Theta base フレームと follower フレームの原点間を結ぶ線の base フレームの x 軸に対する回転角。これは円柱の方位角の座標です。 Z Offset base フレームの z 軸に沿った base フレームと follower フレームの原点間の距離。これは円柱の長さの座標です。
拡張機能
C/C++ コード生成
Simulink® Coder™ を使用して C および C++ コードを生成します。
バージョン履歴
R2012a で導入
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Web サイトの選択
Web サイトを選択すると、翻訳されたコンテンツにアクセスし、地域のイベントやサービスを確認できます。現在の位置情報に基づき、次のサイトの選択を推奨します:
また、以下のリストから Web サイトを選択することもできます。
最適なサイトパフォーマンスの取得方法
中国のサイト (中国語または英語) を選択することで、最適なサイトパフォーマンスが得られます。その他の国の MathWorks のサイトは、お客様の地域からのアクセスが最適化されていません。
南北アメリカ
- América Latina (Español)
- Canada (English)
- United States (English)
ヨーロッパ
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)