Simscape Multibody のフレームの可視化
Simscape™ Multibody™ モデルはフレームに基づいています。フレームとは、モデルにおけるすべての位置と向きのデータが含まれる抽象的な 3 本の軸です。この構造によって、ボディへの固体の接続、機構へのボディの組み立て、そして力、トルク、および運動の指定や検出ができます。フレームの重要性を考えると、モデルにある各種のフレームを配置する場所と方法を可視化することは理にかなっています。
すべてのフレームの表示
モデルのフレームを確認する最も簡単な方法は、可視性をオンに切り替えることです。これは、Multibody Explorer ツールストリップの [Overlays] セクションの  フレームをクリックして行うことができます。
フレームをクリックして行うことができます。
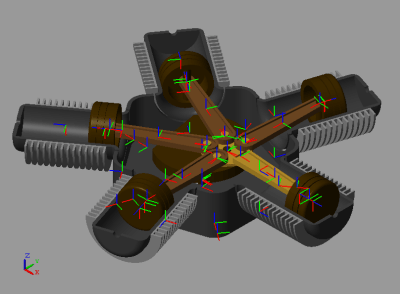
Multibody Explorer でモデルにあるすべてのフレームが表示されます。このアプローチは、フレームの数が少ないモデルに適しています。次の図に、フレームの可視性をオンに切り替えた星型エンジンのモデルを示します。
モデルに多くのフレームがある場合、他のアプローチが最適な場合があります。フレームの可視性を切り替えると、追跡を希望しないフレームによって可視化ペインが見づらくなることがあるためです。
特定のフレームの強調表示
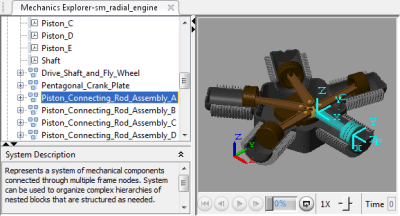
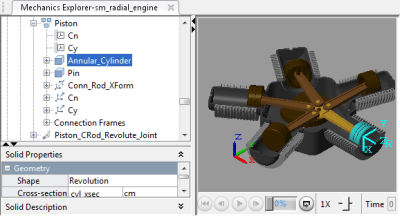
Subsystem ブロックのものを含む、ブロックの端子のフレームだけを表示する場合、ツリー ビュー ペインでノードを選択できます。Multibody Explorer で、選択したノードに関連付けられている端子フレームがターコイズ色で強調表示されます。次の図に、星型エンジン モデルのコネクティング ロッド アセンブリの 1 つがターコイズ色で強調表示されている例を示します。
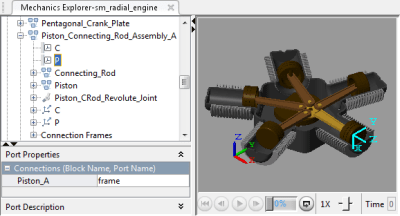
また、個々の端子のフレームを選択することもできます。これらは、ツリー ノードを展開して表示します。たとえば、Piston Connecting Rod Assembly A ノードを展開すると、端子のフレームの P ノードが表示されます。その後、それを選択して、フレームを強調表示できます。次の図に結果を示します。
最後に、個々の固体を可視化ペインで直接選択して、基準フレームを強調表示することができます。次の図に、ピストンの固体の 1 つを直接選択した結果を示します。Multibody Explorer で固体とその基準フレームが強調表示され、その一方でツリービュー ペインに関連する Solid ブロックの名前が表示されます。これが、この特定の固体を修正する場合に変更する必要のあるブロックです。
グラフィカル マーカーを介したフレームの可視化
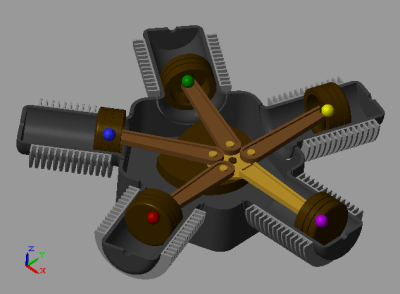
モデルのフレームに特別な意味がある場合 (そのフレームの原点が外力の作用点にあたる場合など)、フレームにグラフィカル マーカーを接続できます。このタスクを実行できるように、Body Elements ライブラリには Graphic ブロックがあります。可視化するフレームにブロックを接続し、使用するマーカーのタイプ (球体、立方体、フレーム) を選択します。次の図に、球体マーカーを使用してピストンの各接続フレームを強調表示している星型エンジン モデルを示します。