平面マニピュレーター モデルにおけるジョイントの運動の指定
この例では、平面マニピュレーターのエンドエフェクタの軌跡を指定して、マルチボディ ダイナミクスのモデルでマニピュレーター ジョイントの必要なアクチュエータ トルクを測定する方法を示します。マルチボディ ダイナミクスのシミュレーションの詳細については、マルチボディ ダイナミクスを参照してください。
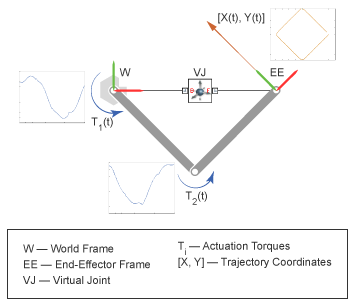
この例では、エンドエフェクタ フレームの時変の軌跡座標を、6-DOF Joint ブロックを使用することによりワールド フレームを基準にして指定します。このブロックは、2 つのフレーム間に必要とされる自由度を与えます。このモデルでは、6-DOF Joint ブロックは物理的接続としては動作しません。
シミュレーション中に、エンドエフェクタは指定された四角形のパターンを追跡し、回転ジョイントでは必要なアクチュエータ トルクが計算されます。
バーチャル ジョイントの追加
MATLAB® コマンド プロンプトで、「
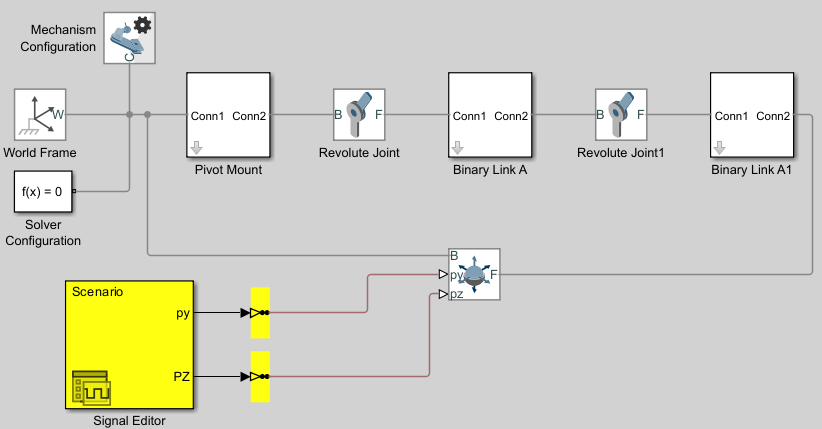
openExample("sm/DocDoublePendulumModelExample")」と入力して、モデルを開きます。このマルチボディ ダイナミクスのモデルを作成する手順については、開ループ連鎖のモデル化を参照してください。6-DOF Joint ブロックをモデルに追加し、ブロック間を図に示すように接続します。
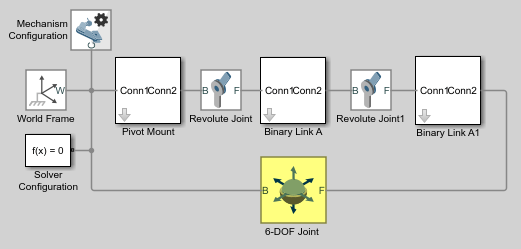
このモデルでは、6-DOF Joint ブロックはワールド フレームとエンドエフェクタ フレームとの間の仮想接続として動作します。ブロックは位置の入力を使用して、エンドエフェクタ フレームの軌跡をワールド フレームを基準にして指定します。6-DOF Joint ブロックの base フレームがワールド フレームに接続されており、follower フレームがエンドエフェクタ フレームに接続されていることを確認します。
運動入力の指定
6-DOF Joint ブロックをダブルクリックしてブロックのダイアログ ボックスを開き、次のパラメーターを指定します。
パラメーター 選択 [Y Prismatic Primitive (Py)] 、 [Actuation] 、 [Motion] Provided by Input[Z Prismatic Primitive (Pz)] 、 [Actuation] 、 [Motion] Provided by Inputブロックに端子 [py] および [pz] が表示されます。
2 つの Simulink-PS Converter ブロックと 1 つの Signal Editor ブロックをモデルに追加します。
Signal Editor ブロックを使用して位置入力を指定します。
Signal Editor ブロックをダブルクリックしてダイアログ ボックスを開きます。
[信号プロパティ] で、[信号エディターを起動します] ボタン
 をクリックして [信号エディター] ウィンドウを開きます。
をクリックして [信号エディター] ウィンドウを開きます。左側のペインで [シナリオ] を展開し、
signal 1の名前をpyに変更し、[プロット/編集] チェック ボックスをオンにして、図に示すようにデータを編集します。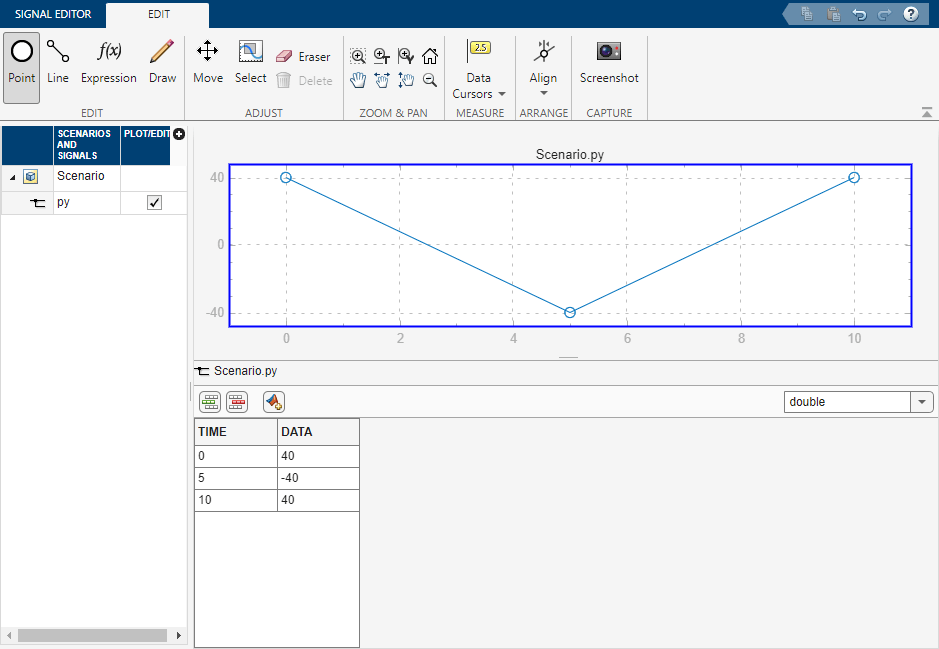
左側のペインで [シナリオ] を右クリックし、[挿入] 、 [信号] を選択し、新しい信号の名前を
pzに変更し、[プロット/編集] チェック ボックスをオンにして、図に示すようにデータを編集します。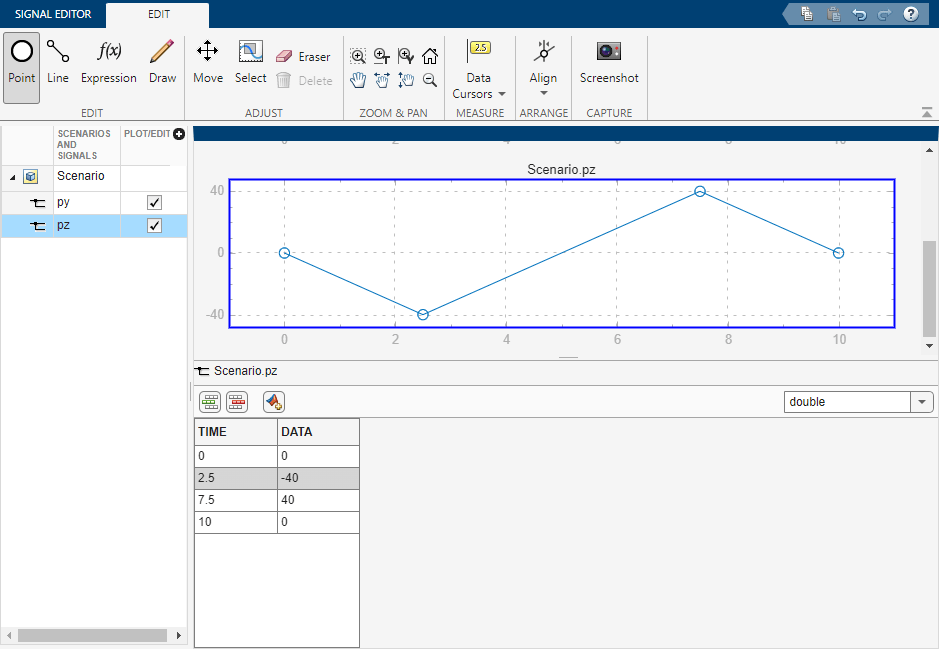
[信号エディター] タブで [保存] をクリックしてデータを MAT ファイルに保存します。[信号エディター] ウィンドウを閉じます。
ダイアログ ボックスの [信号プロパティ] で [アクティブな信号] を
pyに設定して [データを内挿する] を選択します。次に、[アクティブな信号] をpzに設定して [データを内挿する] を選択します。[適用] および [OK] をクリックします。
Simulink-PS Converter ブロックを使用して Simulink® 信号を物理量信号に変換します。
2 つの Simulink-PS Converter ブロックで、次のパラメーターを指定します。
パラメーター 値 [単位] 、 [入力信号単位] cm[入力の取り扱い] 、 [フィルター処理と微分] [入力のフィルター処理、微分の算出][入力の取り扱い] 、 [入力フィルター次数] [2 次フィルター処理][入力の取り扱い] 、 [入力フィルター処理時定数 (秒)] 0.1時間フィルター処理定数が小さいと、シミュレーションの速度が大幅に低下する場合があります。ほとんどの Simscape™ Multibody™ モデルでは、多くの場合、0.1 秒の値で、シミュレーション時間と精度の十分なバランスが得られます。
次の図のようにブロックを接続します。
ジョイントの作動トルクの検出
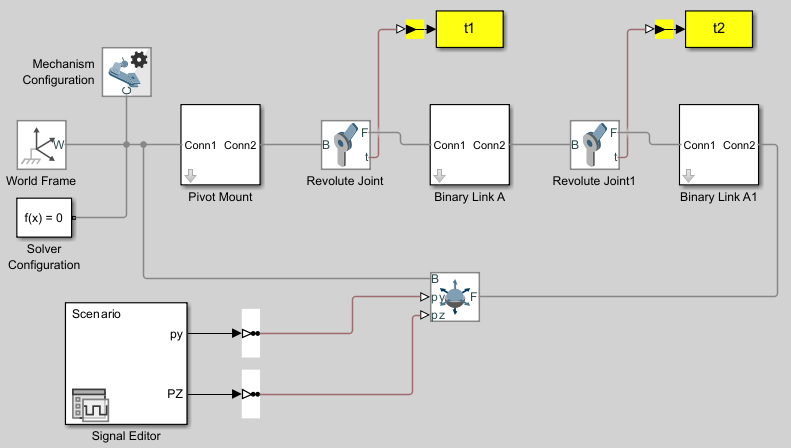
2 つの Revolute Joint ブロックで、次のパラメーターを設定します。
パラメーター 設定 [Actuation] 、 [Torque] Automatically Computed[Sensing] 、 [Actuator Torque] 選択 メモ
Simscape Multibody では、運動入力によるジョイント プリミティブの自由度の数が、自動的に計算されたジョイントの作動力とアクチュエータ トルクをもつジョイント プリミティブの自由度の数と等しくなる必要があります。モデルがこの条件を満たさない場合、シミュレーションではエラーが発生して失敗します。
2 つの PS-Simulink Converter ブロックと 2 つの To Workspace ブロックをモデルに追加します。
PS-Simulink Converter ブロックで、[ベクトル形式] を
1-D配列に設定します。PS-Simulink Converter ブロックによって、物理量信号出力が Simulink 信号に変換されます。2 つの To Workspace ブロックで、[変数名] パラメーターをそれぞれ
t1とt2として指定します。次の図のようにブロックを接続します。
モデルのシミュレーション
シミュレーションを実行すると、Simulink ではエラーが発生して失敗します。
メモ
Simscape Multibody では、閉じた運動学的ループには、運動入力も自動計算された作動力やアクチュエータ トルクもないジョイント ブロックが少なくとも 1 つ含まれていなければなりません。
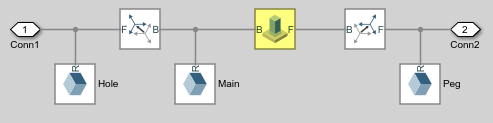
このエラーを解決するには、Weld Joint ブロックを Binary Link A サブシステムに追加し、ブロック間を図に示すように接続します。
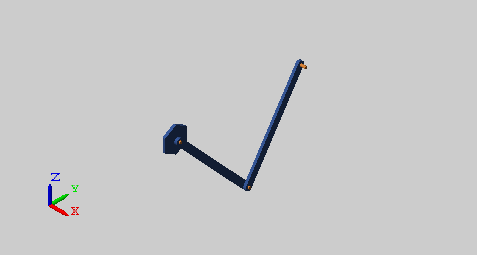
シミュレーションを再度実行します。Multibody Explorer に、平面マニピュレーター モデルの動的 3 次元表示が開きます。
リンク機構で 2 つの回転ジョイントに働く、計算された作動トルクをプロットします。MATLAB コマンド ラインで次のように入力します。
figure; hold on; plot(t1.time, t1.data, 'color', [60 100 175]/255); plot(t2.time, t2.data, 'color', [210 120 0]/255); xlabel('Time'); ylabel('Torque (N*m)'); grid on;
