Signal Editor
相互交換可能なシナリオを表示、作成、編集、および切り替える
ライブラリ:
Simulink /
Sources
説明
Signal Editor ブロックは、信号を含む相互交換可能なシナリオを表示、作成、および編集します。信号は次のいずれかになります。
MATLAB®
timeseriesオブジェクト。timeseriesオブジェクトのDataプロパティが空であってはなりません。timetableオブジェクト。timetableオブジェクトで複数の変数を表現していてはなりません。MATLAB
timeseriesオブジェクトまたはtimetableオブジェクトの構造体。2 次元行列。
ブロックは各信号に対して 1 つの端子を作成します。
シナリオやシナリオに含まれる信号を作成および編集するには、[信号エディターを開く] ( ) をクリックします。Signal Editor ブロックを使用して、モデルでシナリオを切り替えることもできます。
) をクリックします。Signal Editor ブロックを使用して、モデルでシナリオを切り替えることもできます。
Signal Editor ブロックは、信号を 1 つ以上のスカラー Simulink.SimulationData.Dataset オブジェクトとして含む MAT ファイルをサポートします。
シナリオおよび信号の作成と編集
シナリオやそれらに含まれる信号を作成および編集するには、 をクリックして信号エディター ツールを開きます。信号エディター ツールでは、信号を以下の方法で簡単に操作できます。
複数のデータセットに含まれる複数の信号を作成および編集する。信号エディターでは、既定では時系列形式のデータが作成されます。
信号表記を使用して、MATLAB 式を使用するより複雑な信号を作成する。単純な MATLAB 式については、[作成と挿入] ダイアログ ボックスを使用するか表形式の領域で手動で入力できます。
既存のシナリオを使用して、編集および作成可能な既存のデータセットと信号を取得する。
多次元信号を作成および編集する。
信号エディター ツールの詳細については、信号データの作成と編集を参照してください。
プログラムによる操作
Signal Editor ブロックに含まれるシナリオと信号の合計数をプログラムで取得するには、get_param 関数で NumberOfScenarios パラメーターと NumberOfSignals パラメーターをそれぞれ使用します。これらの読み取り専用パラメーターには値が文字ベクトルとして格納されています。これらの値を double に変換するには、関数 str2double を使用します。
Signal Editor ブロックによる出力信号線のラベル付けをプログラムで有効にするには、set_param 関数で PreserveSignalName を 'on' (既定値) に設定します。
set_param(gcb,'PreserveSignalName','on')
プログラムによる操作の詳細については、パラメーターおよびsignalbuilder のプログラムでの使用の置き換えを参照してください。
インポートとエクスポート
信号エディターでは、Microsoft® Excel® などのカスタム ファイル タイプについて以下がサポートされます。
登録されたカスタム ファイル タイプからインポートした信号を編集する。詳細については、カスタム ファイル タイプのインポートを参照してください。
登録されたカスタム ファイル タイプに信号エディターから信号をエクスポートする。詳細については、カスタム登録されたファイル タイプへの信号のエクスポートを参照してください。
Signal Builder ブロックからの移行
関数 signalBuilderToSignalEditor を使用して Signal Builder ブロック構成を Signal Editor ブロックに移植できます。詳細については、Signal Builder ブロックを Signal Editor ブロックで置き換えるおよびSignal Builder ブロックから Signal Editor ブロックへの移行を参照してください。
高速リスタート
Signal Editor ブロックは高速リスタートをサポートします。高速リスタートを有効にしても、引き続き以下を実行できます。
アクティブなシナリオを変更する。
アクティブな信号を変更する。
アクティブな信号は変更できるが、ブロックの信号プロパティは編集できない。
信号エディターを開いてデータを編集する。
例

Parsim を使った並列シミュレーション: テストケース スイープ
この例では、SimulationInput オブジェクトと parsim コマンドの使用によって、Signal Editor ブロック内のさまざまなテスト ケースに対応する複数の Simulink® シミュレーションを実行する方法を示します。parsim コマンドは、Parallel Computing Toolbox™ が利用できる場合はこれを使用してシミュレーションを並列実行します。使用できない場合、シミュレーションは逐次実行されます。

Parsim を使った並列シミュレーション: ラピッド アクセラレータ モードでのパラメーター スイープ
この例では、Parallel Computing Toolbox™ を使用して、モンテカルロ法のシミュレーションを複数並列して実行する方法を示します。並列実行はホスト マシンの複数のコアを活用して多くのシミュレーションの実行を高速化します。これらのシミュレーションは、MATLAB® Parallel Server™ を使用し、コンピューター クラスターで並列に実行することもできます。この例は Parallel Computing Toolbox™ または MATLAB Parallel Server が利用できない場合でも機能しますが、シミュレーションは逐次実行されます。

オートマチック トランスミッション コントローラーのモデル化
この例では、Simulink® を使用して自動車ドライブトレインをモデル化する方法を示します。Stateflow® は、トランスミッション制御ロジックの表現で Simulink モデルを拡張します。Simulink は、動的システムおよびプロセスのモデル化およびシミュレーションのための強力な環境を提供します。しかし、多くのシステムでは、モードを変更したり、新しいゲイン スケジュールを呼び出すなどの監視機能は、発生する可能性があるイベントや、経時的に発生する条件に応答しなければなりません。そのため、環境では、こうした複数のモードや発生する条件を管理できる言語が必要となります。次の例では、Stateflow は、オートマチック トランスミッションでギア選択機能を実行することによって、こうした能力における強みを示します。この機能は、Simulink ブロック線図に Stateflow ブロックを組み込むことによって、自然で直観的な方法でドライブトレイン ダイナミクスと結合されます。
制限
Signal Editor ブロックでは以下はサポートされません。
関数呼び出し
接地信号
Signal Editor ブロックは動的な string をサポートします。最大長が指定された string はサポートしません。さらに、Signal Editor ブロック内の string は次を出力できません。
非スカラーの MATLAB string。
欠損値を含む string データ。
非 ASCII 文字を含む string データ。
端子
出力引数
パラメーター
信号エディターを開くには、[信号エディターを開く] () をクリックします。アクティブなシナリオのすべての信号がプロットされた状態で信号エディターが開きます。
信号エディター ツールから信号データの変化を表示するには、信号エディター ツールのツールストリップで [保存] ボタンをクリックします。
プログラムでの使用
信号エディターを開くには、signalEditor 関数を使用します。詳細については、信号エディターを参照してください。
1 つ以上のスカラー Simulink.SimulationData.Dataset オブジェクトを含むデータ セット ファイル。文字ベクトルとして指定します。特定のロケールのファイル名を別のロケールで使用しないでください。複数のプラットフォームでブロックを使用するときは、MAT ファイル名のみを指定し、MAT ファイルを MATLAB パス上に配置することを検討してください。
MAT ファイルを作成するには、 をクリックします。このボタンで信号エディターが開き、シナリオの MAT ファイルを作成および編集できます。
プログラムでの使用
ブロック パラメーター: Filename |
| 型: 文字ベクトル |
| 値: 文字ベクトル |
既定の設定: 'untitled.mat' |
アクティブなシナリオ。文字ベクトルとして指定します。必要に応じてアクティブなシナリオを切り替えることができます。
signalBuilderToSignalEditor 関数または [モデルで Signal Builder ブロックをチェック] アップグレード アドバイザー チェックを使用して Signal Builder ブロックを Signal Editor ブロックに変換することでこのブロックを作成した場合は、アクティブなシナリオ名は MAT ファイル内のデータ セット変数名です。ただし、このパラメーターをポイントすると、元の Signal Builder グループ名が表示されます。
依存関係
このパラメーターを有効にするには、指定した MAT ファイルが存在することを確認します。
プログラムでの使用
ブロック パラメーター: ActiveScenario |
| 型: 文字ベクトル | 数値 |
| 値: 文字ベクトル | インデックス値 |
既定の設定: 'Scenario' |
信号プロパティのソース。以下として指定します。
ダイアログ パラメーター— ブロック ダイアログ ボックスの信号プロパティを使用します。Signal data in MAT file— [ファイル名] で指定された MAT ファイルの信号プロパティを使用します。単位や内挿のプロパティが信号にない場合、その信号プロパティは既定で Signal Editor ブロック ダイアログ ボックスの設定になります。これらのプロパティには以下が含まれます。単位
データを内挿する
依存関係
このパラメーターを有効にするには、指定した MAT ファイルが存在することを確認します。
プログラムでの使用
ブロック パラメーター: 'SignalPropertySource' |
| 型: 文字ベクトル |
値: Dialog parameters | Signal data in MAT file |
既定の設定: 'SignalPropertySource' |
設定する信号。信号名として指定します。この信号はアクティブな信号と見なされます。
依存関係
このパラメーターを有効にするには、指定した MAT ファイルが存在することを確認します。
このパラメーターは、[信号プロパティをすべての信号に適用] パラメーターがオンになっている場合は無効です。
プログラムでの使用
ブロック パラメーター: ActiveSignal |
| 型: 文字ベクトル | 数値 |
| 値: 文字ベクトル | インデックス ベクトル |
既定の設定: 'Signal 1' |
ActiveSignal は、set_param 関数で Signal Editor ブロックの別の名前と値の引数と組み合わせて設定しないでください。
指定した信号プロパティを適用するオプション。
on— 指定した信号プロパティをすべてのシナリオのアクティブな信号に適用します。off— 信号プロパティを現在のアクティブなシナリオでのみ適用します。
依存関係
このパラメーターを有効にするには、[次のプロパティを使用] パラメーターを
[ダイアログ パラメーター]に設定します。[信号プロパティをすべての信号に適用] パラメーターもオンになっている場合、ブロックは信号プロパティをすべてのシナリオのすべての信号に適用します。
プログラムでの使用
ブロック パラメーター: ApplySigPropsToAllScenarios |
| 型: 文字ベクトル |
値: 'off' | 'on' |
既定の設定: 'on' |
指定した信号プロパティを適用するオプション。
on— 指定した信号プロパティをアクティブなシナリオのすべての信号に適用します。アクティブな信号の概念はありません。off— 信号プロパティをすべての信号には適用しません。
依存関係
このパラメーターを有効にするには、[次のプロパティを使用] パラメーターを
[ダイアログ パラメーター]に設定します。[信号プロパティをすべてのシナリオに適用] パラメーターもオンになっている場合、ブロックは信号プロパティをすべてのシナリオのすべての信号に適用します。
プログラムでの使用
ブロック パラメーター: ApplySigPropsToAllSignals |
| 型: 文字ベクトル |
値: 'off' | 'on' |
既定の設定: 'off' |
信号をバスとして構成するには、このパラメーターを選択します。
このパラメーターは、アクティブな信号が、既存のバス オブジェクトと同じフィールドをもつ MATLAB 構造体である場合のみ選択し、それ以外の場合は対応する新しいバス オブジェクトを作成してください。MATLAB 構造体でないアクティブな信号に対してこのパラメーターを選択すると、シミュレーションはエラーを返します。
依存関係
このパラメーターを有効にするには、指定した MAT ファイルが存在することを確認します。
プログラムでの使用
ブロック パラメーター: IsBus |
| 型: 文字ベクトル |
値: 'off' | 'on' |
既定の設定: 'off' |
バス オブジェクトの名前を選択するか、入力します。データ型アシスタントを使用してバス オブジェクト編集する、またはバス オブジェクトを作成するには、[>>] をクリックします。アクティブな信号は、このバス オブジェクトと同じフィールドをもつ MATLAB 構造体でなければなりません。
依存関係
このパラメーターを有効にするには、[バス信号を出力] を選択します。
プログラムでの使用
ブロック パラメーター: OutputBusObjectStr |
| 型: 文字ベクトル |
| 値: バス オブジェクト名 |
既定の設定: 'Bus: BusObject' |
バス オブジェクト名を指定します。バス オブジェクトがない場合は、[編集] をクリックして型エディターを開き、バス オブジェクトを作成します。詳細については、Create Simulink Bus Objectsを参照してください。
信号の物理単位、許可された単位として指定します。単位を指定するには、テキスト ボックスに入力します。入力中、パラメーターには一致する可能性のある単位が表示されます。詳細については、Simulink モデルでの単位の指定を参照してください。サポートされる単位のリストについては、「Allowed Units」を参照してください。
単位系を制約するには、パラメーターの右側にあるリンクをクリックします。
Unit System Configuration ブロックがコンポーネントに存在する場合は、そのダイアログ ボックスが表示されます。そのダイアログ ボックスを使用して、コンポーネントに対して許可される単位系と許可されない単位系を指定します。
Unit System Configuration ブロックがコンポーネントに存在しない場合は、モデルの [コンフィギュレーション パラメーター] ダイアログ ボックスが表示されます。そのダイアログ ボックスを使用して、モデルに対して許可される単位系と許可されない単位系を指定します。
依存関係
このパラメーターを有効にするには、[次のプロパティを使用] パラメーターを
[ダイアログ パラメーター]に設定します。[信号プロパティをすべてのシナリオに適用] パラメーターもオンになっている場合、ブロックは信号プロパティをすべてのシナリオのすべての信号に適用します。
プログラムでの使用
ブロック パラメーター: Unit |
| 型: 文字ベクトル |
値: 'inherit' | サポートされる物理単位 |
既定の設定: 'inherit' |
サンプルの時間間隔。秒単位で指定します。
依存関係
このパラメーターを有効にするには、指定した MAT ファイルが存在することを確認します。
プログラムでの使用
ブロック パラメーター: SampleTime |
| 型: 文字ベクトル |
値: -1 | サンプル時間 (秒単位) |
既定の設定: '0' |
対応するワークスペース データが存在しない時間ヒットで、データを線形内挿します。
on— 対応するワークスペース データが存在しない時間ヒットで線形内挿を行います。メモ
Signal Editor ブロックが Simulink® Test™ または Simulink Design Verifier™ の新しいテスト ハーネス モデルのソースである場合、[データを内挿する] パラメーターは既定ではオフになります。
off— 現在の出力が、データが存在する最も近い時間での出力に等しくなります。
Signal Editor ブロックは、ワークスペースの 2 つの対応するサンプルを使用して内挿を行います。
doubleデータの場合、Signal Editor ブロックは 2 つの対応するサンプルを使用して値を線形内挿します。Booleanデータの場合、Signal Editor ブロックは 2 つの時間値間の最初の半分の時間にfalseを使用し、残りの半分にtrueを使用します。doubleまたはBoolean以外の組み込みデータ型の場合、Signal Editor ブロックは次のように処理します。データを
doubleにアップキャストする線形内挿を実行する (
doubleデータの説明を参照)内挿値を元のデータ型にダウンキャストする
列挙、固定小数点、または可変サイズの信号データや string データを読み込む場合は、[データを内挿する] パラメーターをクリアします。
ブロックは、最後の既知のデータ点の値を、その点の後の時間ヒットの値として使用します。
データが入手可能な最後の時間ヒット後のブロック出力を決定するには、以下のパラメーターの設定を組み合わせます。
データを内挿する
最後のデータ後の出力フォーム
詳細については、最後のデータ後の出力フォームを参照してください。
ラピッド アクセラレータ モードでは、[データを内挿する] パラメーターが選択されている場合、Signal Editor ブロックで int64 データ型と uint64 データ型はサポートされません。
依存関係
このパラメーターを有効にするには、[次のプロパティを使用] パラメーターを
[ダイアログ パラメーター]に設定します。[信号プロパティをすべてのシナリオに適用] パラメーターもオンになっている場合、ブロックは信号プロパティをすべてのシナリオのすべての信号に適用します。
プログラムでの使用
ブロック パラメーター: Interpolate |
| 型: 文字ベクトル |
値: 'off' | 'on' |
既定の設定: 'on' |
[ゼロクロッシング検出を有効にする] を選択すると、入力配列に同じ時間値のエントリが複数含まれている場合に Signal Editor ブロックでゼロクロッシングが検出されます。たとえば、ブロックで次の入力データを読み込むとします。
time: 0 1 2 2 3 signal: 2 3 4 5 6
時間 2 において、入力データの不連続によるゼロクロッシングが発生します。詳細については、ゼロクロッシング検出を参照してください。
バスの入力データを読み込むときに、Signal Editor ブロックはすべてのリーフ バス要素のゼロクロッシングを検出します。
このブロックでは、可変ステップ ソルバーを使用するシミュレーションでのみゼロクロッシング検出がサポートされます。シミュレーションに固定ステップ ソルバーを使用する場合、このブロックに対してゼロクロッシングの検出や特定は行われません。
依存関係
このパラメーターを有効にするには、指定した MAT ファイルが存在することを確認します。
プログラムでの使用
ブロック パラメーター: ZeroCross |
| 型: 文字ベクトル |
値: 'off' | 'on' |
既定の設定: 'off' |
ワークスペース データが入手可能な最後の時間ヒット後のブロック出力を決定するには、以下のパラメーターの設定を組み合わせます。
データを内挿する
最後のデータ後の出力フォーム
次の表で、この 2 つのオプションの値に基づくブロック出力を示します。
| [最後のデータ後の出力フォーム] の設定 | 内挿データの設定 | 最終データの後のブロック出力 |
|---|---|---|
| オン | 最終データ値から外挿 |
| オフ | エラー | |
| オン | 0 |
| オフ | 0 | |
| オン | ワークスペースからの最終値 |
| オフ | ワークスペースからの最終値 |
たとえば、ブロックは最後の 2 つの既知のデータ点を使用して、次を実行した場合に最後の既知のデータ点の後に発生するデータ点を外挿します。
[データを内挿する] を選択。
[最後のデータ後の出力フォーム] を
[外挿]に設定。
依存関係
このパラメーターを有効にするには、指定した MAT ファイルが存在することを確認します。
プログラムでの使用
ブロック パラメーター: OutputAfterFinalValue |
| 型: 文字ベクトル |
値: 'Setting to zero' | 'Extrapolation' | 'Holding final value' |
既定の設定: 'Setting to zero' |
ブロックの特性
データ型 |
|
直達 |
|
多次元信号 |
|
可変サイズの信号 |
|
ゼロクロッシング検出 |
|
拡張機能
バージョン履歴
R2017b で導入Signal Editor ブロックの [信号エディターを開く] ボタン では、Signal Editor ブロックと同期したバージョンの信号エディター ツールが開くようになりました。R2026a より前のリリースでは、信号エディター ツールのすべてのインスタンスが同じ特性を持っていました。詳細については、信号エディター間の違いを参照してください。
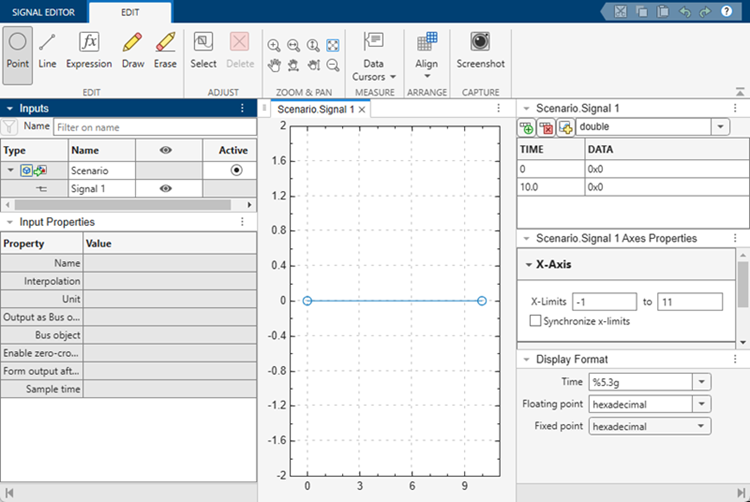
Signal Editor ツールのブロック バージョンは、以下のように変更されています。
[信号エディターを開く] をクリックすると、アクティブなシナリオが取り込まれた状態で信号エディター ツールが開くようになりました。アクティブなプロットには、シナリオの最後の信号が表示されます。
階層の新しい [アクティブ] 列に、ブロックのアクティブなシナリオが表示されます。アクティブなシナリオを変更するには、関連するボタンをクリックします。
新しい入力プロパティにより、対応するブロック パラメーターがサポートされます。
Signal Editor ブロック 信号エディター インターフェイス バス オブジェクトとして出力
バス信号を出力
バス オブジェクト
バス オブジェクトの選択
ゼロクロッシング検出を有効にする
ゼロクロッシング検出を有効にする
最後のデータ後の出力フォーム
最後のデータ後の出力フォーム
サンプル時間
サンプル時間 メモ
信号エディター ツールの [データを内挿する] パラメーターおよび [単位] パラメーターは、ブロック パラメーター [次のプロパティを使用] が
[MAT ファイル内の信号データ]に設定されている場合にのみ、Signal Editor ブロックに反映されます。信号エディター ツールでアクティブなシナリオを変更するには、階層の [アクティブ] 列にある関連するボタンをクリックしてから、[保存] をクリックします。ツールを閉じると、Signal Editor ブロックが更新されます。
信号エディター ツールを開くと、ブロック パラメーターは読み取り専用になります。制御を信号エディター ツールから Signal Editor ブロックに変更するには、信号エディター ツールを閉じます。
関連付けられている信号エディター ツールで Signal Editor ブロックからのアクティブな信号のパラメーター変更を確認するには、信号階層でアクティブな信号をクリックします。