ラチェット リフター
この例では、ラチェット リフターをモデル化し、複雑なジオメトリが関与する接触問題に接触プロキシを使用する方法を示します。
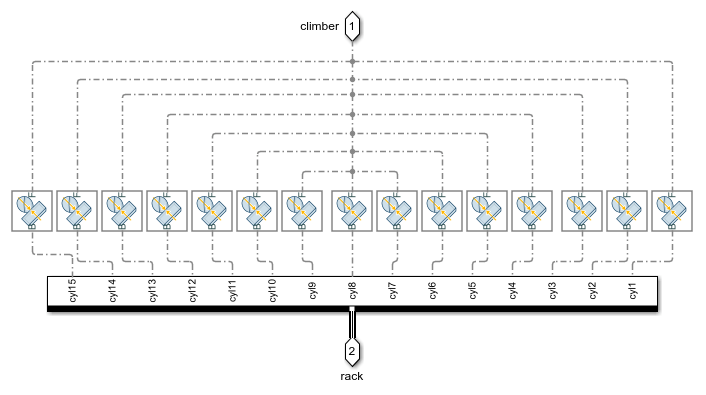
この例では、トラベラーのハンドルを上下に動かすと、歯の付いたラックをトラベラーが登って荷重を持ち上げます。歯の付いたラックとクライマー間の接触を単純化するために、このモデルでは、ラックの歯とクライマーのシャフトピンを円柱や球体などのプロキシで表現し、これらプロキシ間の接触のシミュレーションを行います。
モデル

サブシステム
ラチェット リフターは、Toothed Rack、Traveler、Neg Climber、Pos Climber、Contact の 5 つのサブシステムで構成されます。Pin Slot Jointブロックは歯の付いたラックとトラベラーを接続します。クライマーはトラベラーとSpring and Damper Forceブロックによって接続されます。
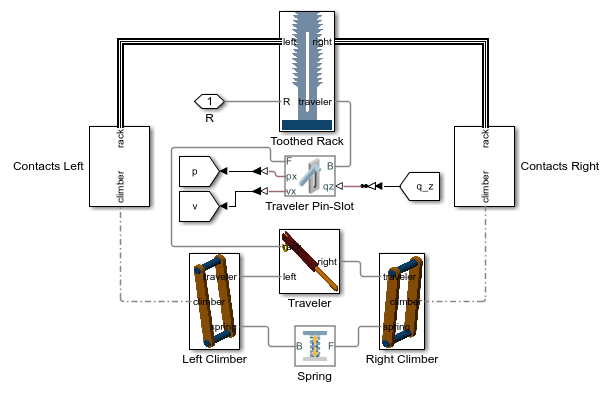
接触のシミュレーション
クライマーとラックの歯の間の接触力をモデル化するために使用されるSpatial Contact Forceブロックは、Contact サブシステム内に含まれています。
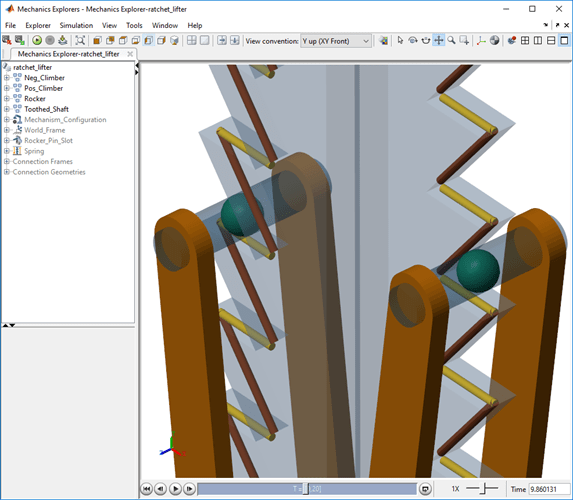
アニメーションとプロキシ
この図は、ラックの歯とクライマーの円柱のプロキシを示しています。
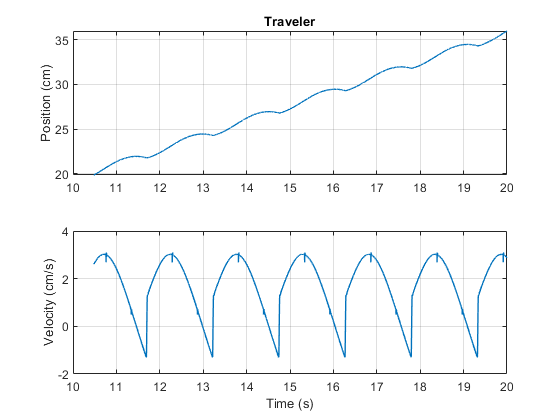
シミュレーション結果
このプロットは、トラベラーの中央ピンの位置と速度を示しています。
参考
Pin Slot Joint | Spatial Contact Force | Spring and Damper Force