産業機械
Simscape™ Multibody™ には、産業機械の動的な挙動をモデル化して解析するためのツールが用意されています。これには、設計上の異なる決定が機械の効率性、安定性、速度などのパフォーマンスに与える影響の調査が含まれます。
注目の例
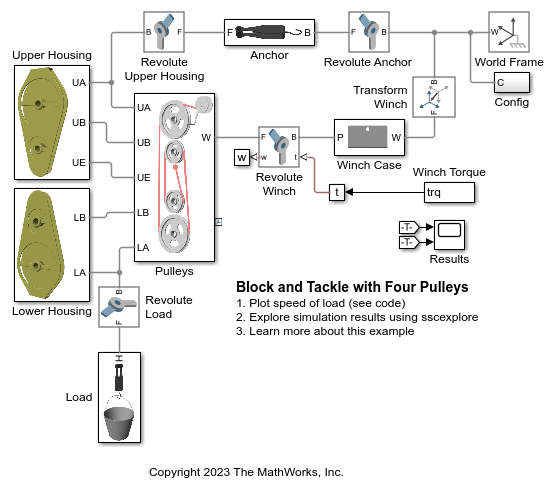
4 個のプーリを使用する滑車装置
この例では、4 個のプーリを使用する滑車装置をモデル化します。ウインチにトルクが加えられると、ウインチがプーリ機構に作用し、荷重を持ち上げます。滑車装置のモデル化には、Simscape™ Multibody™ の Belts and Cables ライブラリのブロックが使用されています。
ケーブル駆動のスライド間テーブル
この例では、ケーブル駆動機構を使用する XY 間位置決めテーブルをモデル化します。1 本のケーブルが 7 つの異なるプーリに巻き付けられ、2 つの入力プーリの回転角度をテーブルの x-y 位置に変換します。

摩擦をもつ親ねじ
この例では、摩擦をもつ親ねじをモデル化します。親ねじの拘束力が測定され、それを使用して親ねじでの摩擦トルクが計算されます。連続スティックスリップ摩擦モデルを使用して、親ねじによって接続されている 2 つの部品の相対回転速度を基に摩擦係数を決定します。
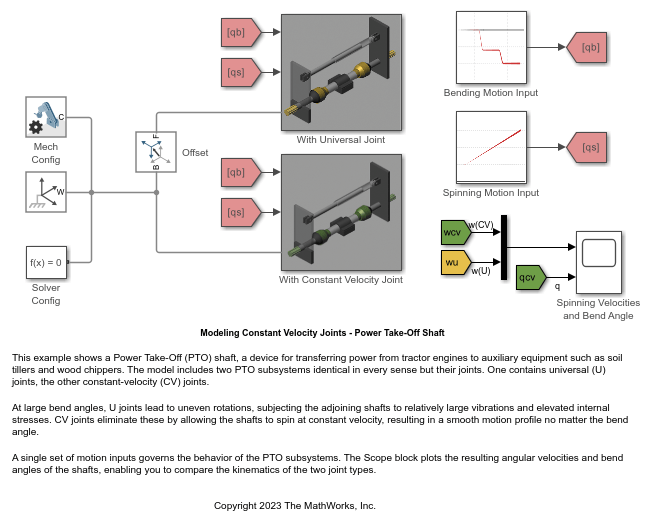
等速ジョイントのモデル化 - パワー テイクオフ シャフト
この例では、パワー テイクオフ (PTO) シャフトを説明します。これは、トラクターのエンジンから、耕耘機やウッド チッパーのような補助装置に動力を伝えるための装置です。モデルには、ジョイント以外のすべての面において同じである 2 つの PTO サブシステムが含まれています。1 つにはユニバーサル (U) ジョイント、もう 1 つには等速 (CV) ジョイントが含まれています。

自動ロック式ウォーム ギア拘束のモデル化 - ウォーム ジャッキ
この例では、自動ロック式のウォーム ギア拘束をモデル化します。このモデルは、ウォームに与えられたトルクで駆動される機械式ジャッキを示しています。モデルに含まれる 2 つの Worm Jack サブシステムは、ウォームのリード角の値を除いてすべて同一です。両方のサブシステムで、摩擦モデルが Worm and Gear Constraint ブロックに適用されています。
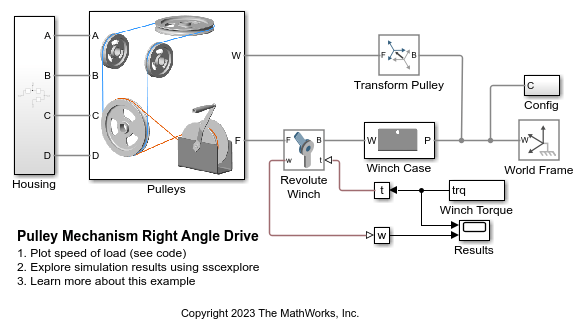
プーリ機構による直角駆動
この例では、ウインチに加えられるトルクを受け、そのウインチに対して 90 度回転した位置にあるプーリに伝達するプーリ機構をモデル化します。この例では、Simscape Multibody の Belts and Cables ライブラリのブロックを使用して、単一の平面にすべては収まらないプーリ機構をモデル化します。

ラチェット リフター
この例では、ラチェット リフターをモデル化し、複雑なジオメトリが関与する接触問題に接触プロキシを使用する方法を示します。

回転インターフェイス: 電動ブレッド スライサー
このモデルでは、1 自由度の電動ブレッド スライサー機構のシミュレーションを実行します。電気回路とモーターは Simscape™ でモデル化していますが、ブレッド スライサー機構は Simscape Multibody™ でモデル化しています。モデルでは Rotational Multibody Interface ブロックを使用して、Simscape コンポーネントを Multibody の Revolute Joint ブロックに接続します。

並進インターフェイス:気体圧モデルを使用した星型エンジン
このモデルでは、5 気筒星型エンジンのシミュレーションを実行します。気筒内の圧力のダイナミクスは、Simscape™ Foundation Library の気体ドメインと機械並進ドメインを使用してモデル化されます。3D 機械コンポーネントは、Simscape Multibody™ を使用してモデル化されます。モデルの 1D Simscape パーツと 3D Multibody パーツ間のインターフェイスがどのようにとられているかを確認するには、"Force Model" というブロックのいずれかの内部を確認してください。圧力モデルは、クランク角度に基づいて圧力を適用する、理想化された圧力源です。このモデルは、より現実的な気筒チャンバーの圧力モデルと置き換えることができます。気筒は A、C、E、B、D の順に点火し、クランク回転 144 度ごとに動力工程が発生します。
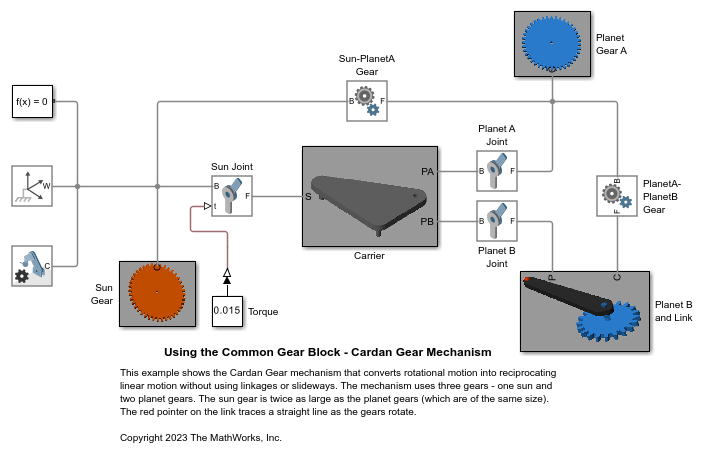
Common Gear ブロックの使用 - カルダン歯車機構
この例では、リンクや滑り面を使用せずに回転運動を線形往復運動に変換するカルダン歯車機構を示します。この機構は、太陽歯車 1 つ、遊星歯車 2 つの、合計 3 つの歯車を使用します。太陽歯車は遊星歯車の 2 倍の大きさで、遊星歯車同士は同じ大きさです。リンクの赤いポインターは、歯車の回転に伴って直線をトレースします。
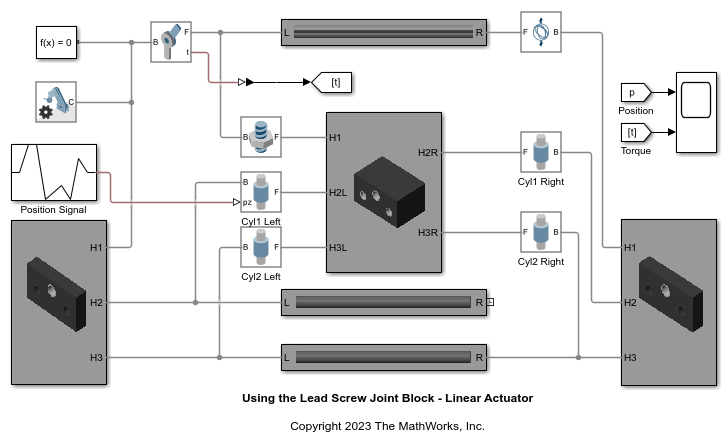
Lead Screw Joint ブロックの使用 - 線形アクチュエータ
この例では、Lead Screw Joint ブロックを使用して線形アクチュエータをモデル化する方法を示します。Lead Screw Joint ブロックは、Revolute Joint ブロックでの回転運動を、4 つの Cylindrical Joint ブロックでの並進運動に変換します。並進運動は、円柱型ジョイントへの運動入力として指定されており、必要なアクチュエータ トルクは、回転ジョイントで自動的に計算されます。
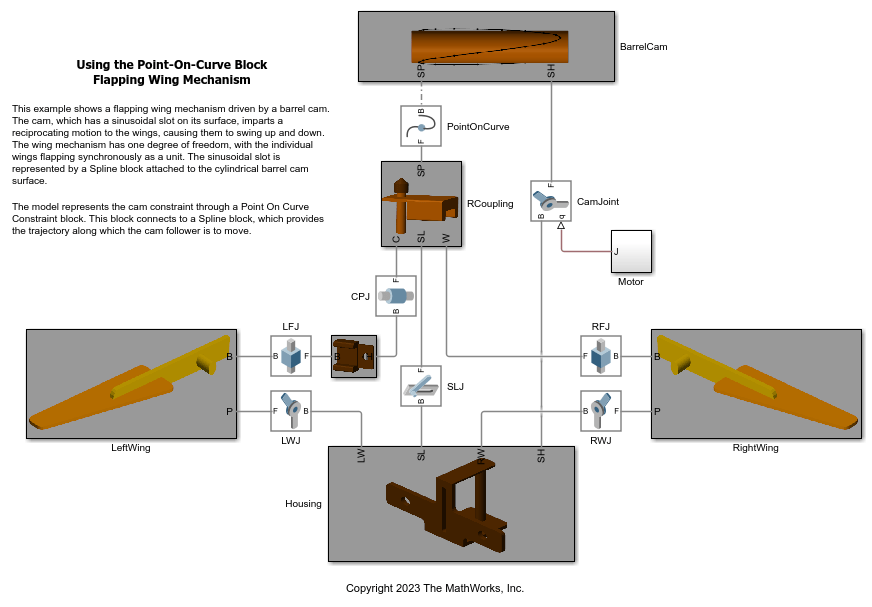
Point-On-Curve ブロックの使用:羽ばたく翼の機構
このモデルでは、筒型カムをベースにした羽ばたく翼の機構のシミュレーションを実行します。これは 1 自由度機構で、2 つの翼は互いに対して同期して羽ばたきます。Spline ブロックと Point On Curve ブロックを使用して筒型カム機構をモデル化し、翼の羽ばたく運動を作動させています。
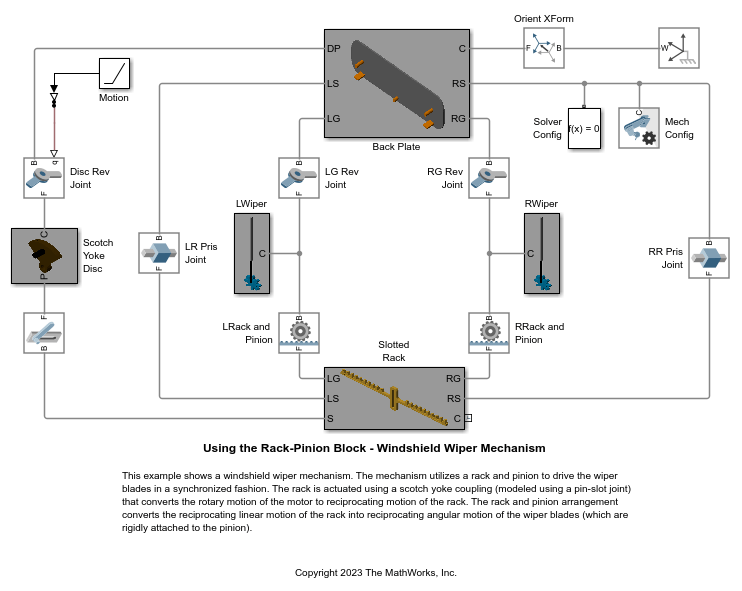
Rack-Pinion ブロックの使用 - ワイパー機構
この例では、ワイパー機構を示します。この機構ではラック アンド ピニオンを使用して、ワイパー ブレードを同期して駆動します。ラックは、スコッチ ヨーク継手 (ピンスロット ジョイントを使用してモデル化) を使用して作動します。この継手により、モーターの回転運動がラックの往復運動に変換されます。ラック アンド ピニオン配置により、ラックの線形往復運動が、ワイパー ブレードの往復角運動に変換されます (ワイパー ブレードはピニオンに剛に接続されています)。