ロボティクス
Simscape™ Multibody™ には、マニピュレーター、ヒューマノイド ロボット、ドローンなどのロボット システムを設計、シミュレーション、テストするためのツールが用意されています。
トピック
- 順運動学と逆運動学の 5 節ロボットでの実行
この例では、
KinematicsSolverオブジェクトを使用して、5 節ロボット機構で順運動学 (FK) と逆運動学 (IK) を実行する方法を示しています。
注目の例
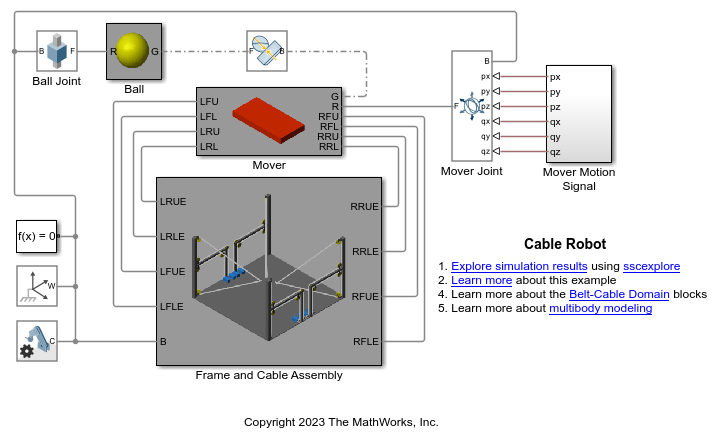
ケーブル ロボット
この例では、ケーブル ロボットをモデル化します。このロボットは、ムーバーの 6 自由度を制御する 8 つの独立したベルト-ケーブル回路で構成されます。機構の中心軸に沿って、一定の高さからボールが落とされます。ムーバーは最初、ボールの真下で運動を開始します。ボールがムーバーに衝突すると弾性で跳ね返るように、ムーバーとボールの間の接触がモデル化されます。ムーバーの目標は、ボールがバウンドするたびに複雑になっていく操作を実行することです。ムーバーは運動によって作動し、必要なケーブル、プーリ、およびモーター スプールの運動学的特性がそこから計算されます。
直交座標 3 次元プリンター
この例では、直交座標 3 次元プリンターをモデル化します。このモデルでは、各軸のモーターの回転運動を指定して印刷パスを定義することができます。この例では、事前定義された回転運動を使用して、印刷ヘッドが 2 つの文字 S と M のエッジに沿って動きます。
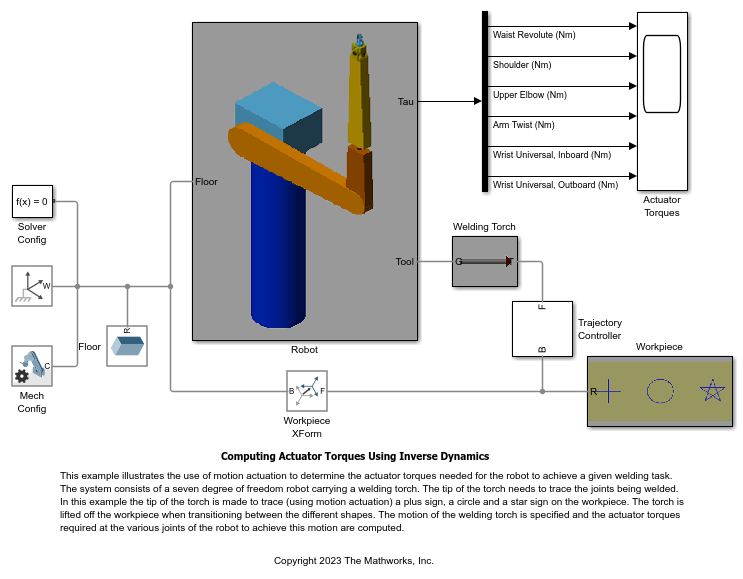
逆動力学を使用したアクチュエータ トルクの計算
この例では、運動作動を使用して、与えられた溶接タスクをロボットが達成するために必要なアクチュエータ トルクを決定する方法を示します。このシステムは、溶接トーチをもつ 7 自由度のロボットからなります。トーチの先端は、溶接するジョイントをなぞる必要があります。この例では、トーチの先端で (運動作動を使用して) 加工物上のプラス記号、円、星印をなぞります。形状から形状へ移動する際には、トーチを持ち上げて加工物から離します。溶接トーチの運動が指定され、ロボットがこの運動を達成するために各種ジョイントで必要とするアクチュエータ トルクが計算されます。

Creating a Mobile Robot Using a MATLAB App
Demonstrates how a multibody system can be built using an interactive MATLAB® app. In this example an application for exploring the design space of a multibody system is shown. The system here is a mobile manipulator with four omni-directional wheels.

MATLAB でのロボット グリッパー マルチボディの作成
この例では、MATLAB® でロボット グリッパー マルチボディを作成します。これは、"simscape.multibody.*" 名前空間の下のさまざまなクラスを使用して、階層的なマルチボディ システムを構築する方法を示します。

ヒューマノイド ロボット
この例は、smimport コマンドを使用して URDF ファイルからインポートしたものです。URDF ファイル "Humanoid.urdf" とロボットのパーツを可視化する STEP ファイルを使用してこの例を作成しています。ロボットに興味深い動きをさせるために、インポートしたモデルに手動でジョイントのモーションの作動を追加しています。

荷物配送用クワッドコプター
この例では、荷物配送用クワッドコプターをモデル化します。このクワッドコプターは離着陸ポートから離陸し、目的の軌跡を追従しながら荷物を回収場所に配送します。

順運動学と逆運動学を使用したピック アンド プレース ロボット
ピック アンド プレース タスクを実行するデルタ ロボットをモデル化します。
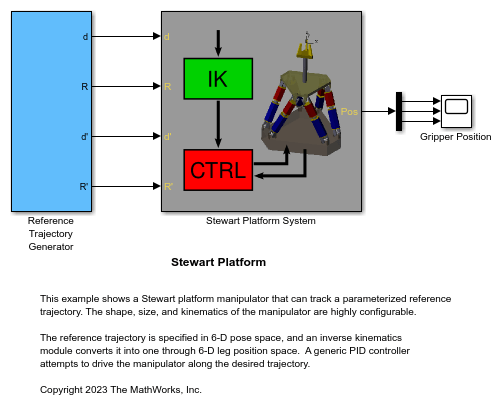
スチュワート プラットフォーム
このモデルでは、パラメーター化された基準軌跡を追跡できるスチュワート プラットフォーム マニピュレーターを示します。マニピュレーターの形状、サイズおよび運動学は高度に構成可能です。
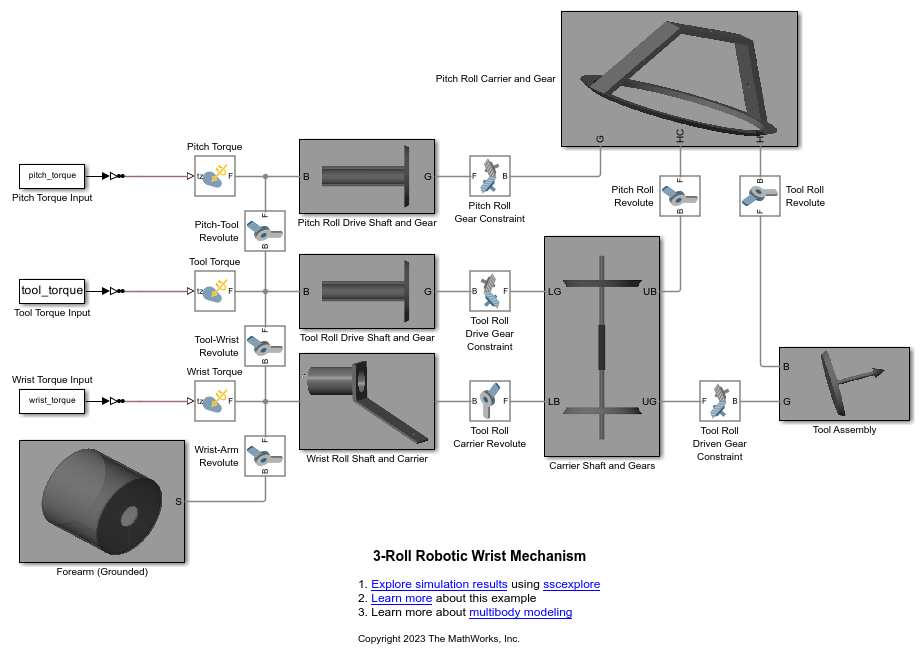
ロボットのスリー ロール型手首機構
この例では、Cincinnati-Milacron 社のスリー ロール型手首機構に基づいて、ロボットのスリー ロール型手首機構をモデル化します。この機構では 3 対のかさ歯車の対を使用して、工具を 3 つの独立した軸の周りで回転させます。工具の先端は球体の表面に沿って動き、その球体の中心を貫通する軸の周りを回転できます (ドリル動作)。この例では、あらかじめ計算されたトルクを 3 つのドライブ シャフトに適用し、工具の先端で (球体の表面上で) 特定の軌跡を得ています。軌跡に沿ったさまざまな点で、ドリルが実行されます。

ヒューマノイド ウォーカーの学習
Simscape Multibody™ を使用してヒューマノイド ロボットをモデル化し、遺伝的アルゴリズム (Global Optimization Toolbox のライセンスが必要) または強化学習 (Deep Learning Toolbox™ および Reinforcement Learning Toolbox™ のライセンスが必要) を使用して学習させます。