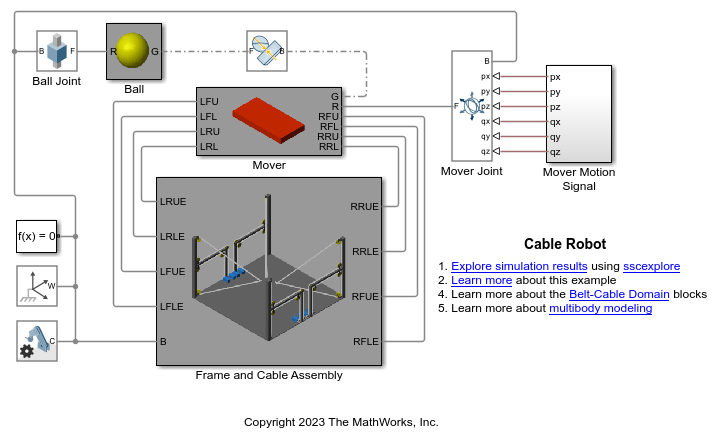
ケーブル ロボット
この例では、ケーブル ロボットをモデル化します。このロボットは、ムーバーの 6 自由度を制御する 8 つの独立したベルト-ケーブル回路で構成されます。機構の中心軸に沿って、一定の高さからボールが落とされます。ムーバーは最初、ボールの真下で運動を開始します。ボールがムーバーに衝突すると弾性で跳ね返るように、ムーバーとボールの間の接触がモデル化されます。ムーバーの目標は、ボールがバウンドするたびに複雑になっていく操作を実行することです。ムーバーは運動によって作動し、必要なケーブル、プーリ、およびモーター スプールの運動学的特性がそこから計算されます。
参考
Belt-Cable End | Belt-Cable Properties | Belt-Cable Spool | Bushing Joint | Planar Joint | Pulley | Revolute Joint | Spatial Contact Force | Spherical Joint