スチュワート プラットフォーム
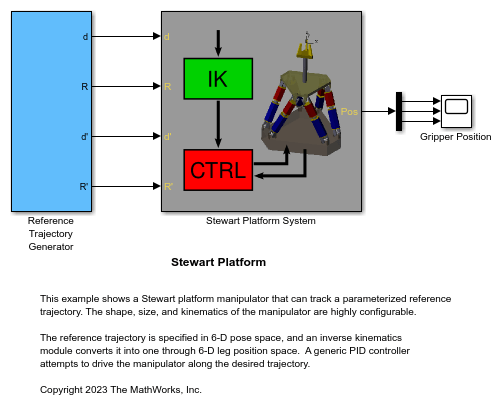
このモデルでは、パラメーター化された基準軌跡を追跡できるスチュワート プラットフォーム マニピュレーターを示します。マニピュレーターの形状、サイズおよび運動学は高度に構成可能です。
基準軌跡を 6 次元ポーズ空間で指定し、それを逆運動学モジュールで 1 次元から 6 次元の脚位置空間に変換します。汎用 PID コントローラーが、マニピュレーターを目的の軌跡沿いに駆動することを試みます。
参考
Cylindrical Joint | Transform Sensor