直交座標 3 次元プリンター
この例では、直交座標 3 次元プリンターをモデル化します。このモデルでは、各軸のモーターの回転運動を指定して印刷パスを定義することができます。この例では、事前定義された回転運動を使用して、印刷ヘッドが 2 つの文字 S と M のエッジに沿って動きます。
このプリンターには、x、y、z 方向の印刷ヘッドの動きを駆動する、3 つの線形アクチュエータがあります。これらのアクチュエータを、Lead Screw Joint ブロックによってモデル化します。親ねじジョイントは、回転入力を並進運動に変換します。
モデル

サブシステム
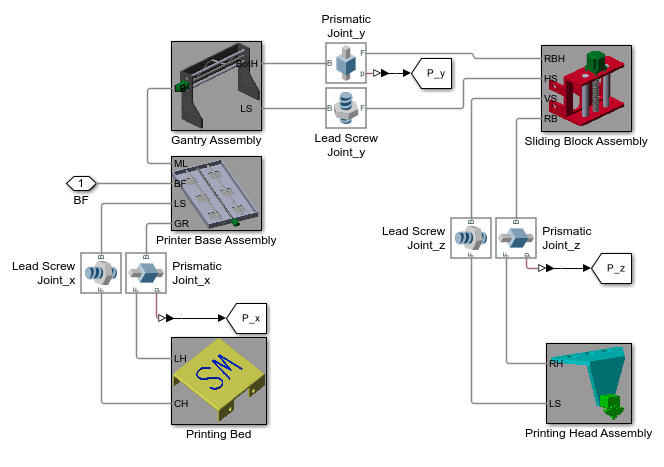
3 次元プリンターは 3 自由度をもち、Printing Bed、Printer Base Assembly、Gantry Assembly、Sliding Block Assembly、Printing Head Assembly の 5 つのサブシステムで構成されます。直進ジョイントと親ねじジョイントがサブシステムを拘束し、x、y、z 軸に沿った動きを許可します。
Multibody Explorer でのアニメーション

シミュレーション結果
次のプロットは、印刷中の印刷ヘッドの x 位置、y 位置、z 位置を示しています。

参考
Lead Screw Joint | Revolute Joint