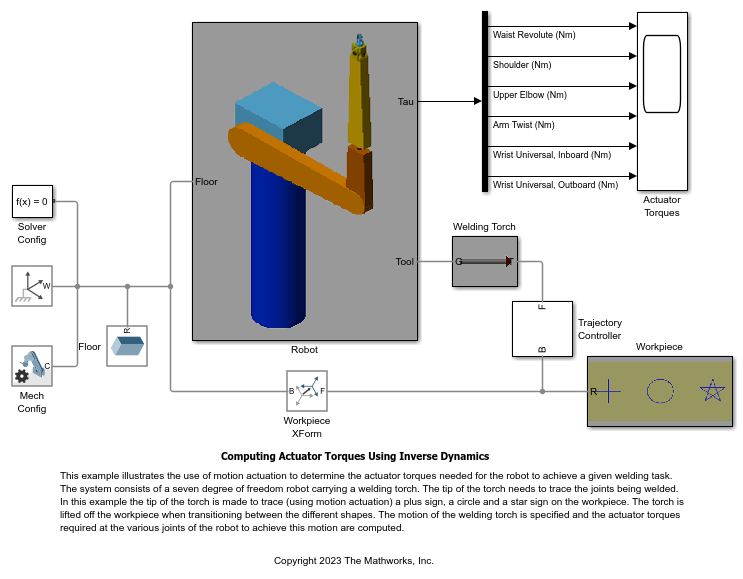
逆動力学を使用したアクチュエータ トルクの計算
この例では、運動作動を使用して、与えられた溶接タスクをロボットが達成するために必要なアクチュエータ トルクを決定する方法を示します。このシステムは、溶接トーチをもつ 7 自由度のロボットからなります。トーチの先端は、溶接するジョイントをなぞる必要があります。この例では、トーチの先端で (運動作動を使用して) 加工物上のプラス記号、円、星印をなぞります。形状から形状へ移動する際には、トーチを持ち上げて加工物から離します。溶接トーチの運動が指定され、ロボットがこの運動を達成するために各種ジョイントで必要とするアクチュエータ トルクが計算されます。
参考
Bushing Joint | Revolute Joint