MATLAB での 4 節リンク マルチボディ機構の作成
この例では、Simscape™ Multibody™ を使用して MATLAB® で 4 節リンク機構を作成します。"simscape.multibody.*" 名前空間の下のさまざまなクラスを示して、MATLAB でマルチボディ システムを構築します。
モデルを開き、カスタム関数 "fourbar" を使用して、ユーザー指定のリンク長で 4 節リンク機構のマルチボディを作成します。各パラメーターは、スカラーの長さを指定する Simscape Value でなければなりません。
[fb, op] = fourBar(simscape.Value(12,"cm"), simscape.Value(10,"cm"), simscape.Value(5,"cm"), simscape.Value(8,"cm"));
4 節リンク機構は、X-Y 平面が運動平面で、-Y 方向の重力を受けるように作成されます。出力 op は、左下のジョイント角度を、高い優先順位をもつノミナル値に設定する操作点です。
機構を可視化するには、以下を実行します。
cmb = compile(fb);
visualize(cmb,computeState(cmb,op),"vizFourBar");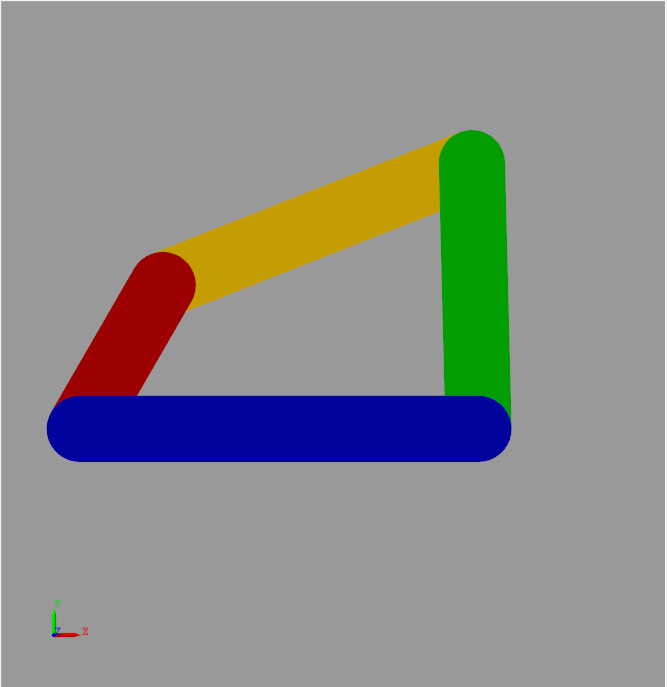
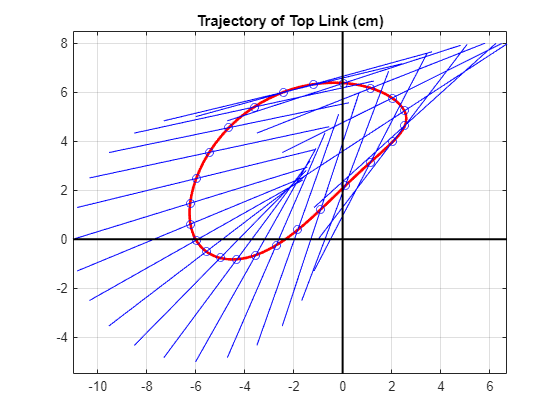
4 節リンク機構の作成後に、指定した 4 節リンク機構の上の (遠位) リンクの軌跡を計算してプロットするなど、その機構に対して解析を実行することもできます。関数 "fourBarMotionPlot" は、(左のリンクが 4 節リンク機構のクランクであるときに) クランク角の 360 度の範囲全体で上のリンクの軌跡をプロットします。この関数は、360 度の範囲全体において 1 度のステップでクランク角を変化させます。上のリンクの中点の軌跡が、1 度のステップでプロットされ、(通常は) 滑らかな曲線が形成されます。この曲線に沿った座標は、ワールド フレームを基準としています。
fourBarMotionPlot(fb);