Variable Mode Joint Recirculation - Collision Course
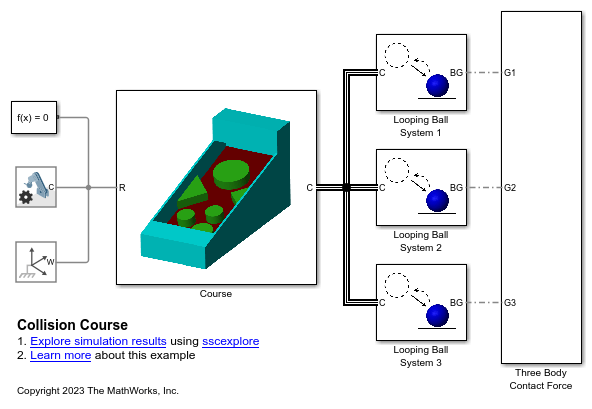
This example simulates three balls with trajectories that restart when they reach the bottom of an obstacle course, allowing each of them to traverse the course multiple times per simulation.
Spherical joints with their modes configured to be provided by input are used to transport each ball back to its starting position after it reaches the bottom of the course. The contact signal emitted when a ball touches the bottom front wall of the course is used to temporarily change the mode of the ball's spherical joint, resetting the ball's position, but not its rotation.