マルチボディ組み立てのワークフロー
モデル化するジョイントと拘束の調査
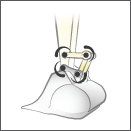
さまざまなボディの間のジョイントと拘束を特定します。ジョイントは、ピストンとそのケースとの間のジョイントのような現実的なものでも、2 つの惑星間のジョイントのようなバーチャルなものでも構いません。
ジョイントと拘束を使用したボディの組み立て
ジョイントを介してボディのフレームを接続し、ボディ間の自由度をモデル化します。さらに、ギア間にあるような特殊な拘束によってこれらの自由度を制限することもできます。ギア モデルの組み立てで例を参照してください。
モデル アセンブリのガイド
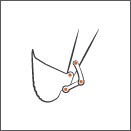
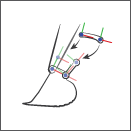
各種ジョイントの状態ターゲットを指定します。時間ゼロにおけるジョイントの目標位置と目標速度を指定することができます。状態ターゲットが有効であり、かつ矛盾がない場合、ジョイントは指定した状態で組み立てられます。閉ループ連鎖のモデル化の節アセンブリのガイドとモデルの可視化で例を参照してください。
モデル アセンブリの検証
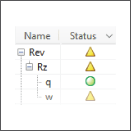
ブロック線図を更新します。モデルを可視化して組み立てに問題がないか調べます。Simscape™ 変数ビューアーを開き、すべての状態ターゲットが満たされているかどうかを確認します。閉ループ連鎖のモデル化の節モデル アセンブリの検証で例を参照してください。