プログラムでのシナリオ作成
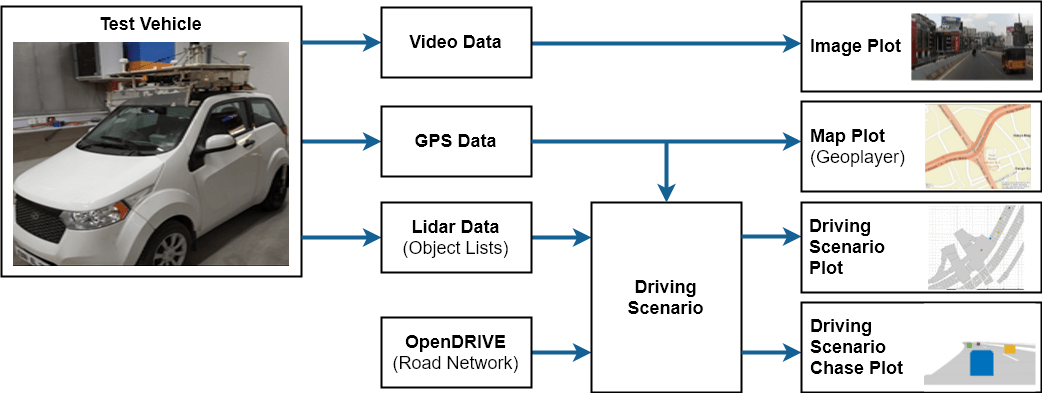
drivingScenario オブジェクトを使用してドライビング シナリオをプログラムで作成drivingScenario オブジェクトにより、MATLAB® コマンド ラインからドライビング シナリオを作成できます。このオブジェクトを使用して、複雑な道路ネットワークや駐車場を設計し、アクターとその軌跡を指定します。その後、センサー モデルを使用してこれらのシナリオから合成データを生成し、そのデータを鳥瞰図プロットで可視化できます。
drivingScenario オブジェクトの柔軟なインターフェイスにより、各種条件で運転アルゴリズムを迅速にテストするためのシナリオのバリエーションを作成できます。詳細については、プログラムでのドライビング シナリオのバリエーションの作成を参照してください。
関数
トピック
ドライビング シナリオ
- プログラムでのドライビング シナリオの作成
合成センサー データおよび追跡アルゴリズム用にグラウンド トゥルース ドライビング シナリオをプログラムで作成します。 - Define Road Layouts Programmatically
Programmatically create road junctions and combine these junctions to create more complicated road networks. - Simulate Vehicle Parking Maneuver in Driving Scenario
Simulate a parking maneuver and generate sensor detections in a large parking lot using a cuboid driving scenario. - Create Actor and Vehicle Trajectories Programmatically
Programmatically create actor and vehicle trajectories for a driving scenario. - プログラムでのドライビング シナリオのバリエーションの作成
ドライビング シナリオ デザイナー アプリを使用して作成されたドライビング シナリオのバリエーションをプログラムで作成する。 - センサー カバレッジ、検出、および追跡の可視化
鳥瞰図プロットを構成および使用して、自車の周囲のセンサー カバレッジ、検出、および追跡の結果を表示する。 - Automate Control of Intelligent Vehicles by Using Stateflow Charts
Model a highway scenario with intelligent vehicles that are controlled by decision logic defined by a Stateflow® chart.
センサー
- Model Radar Sensor Detections
Model and simulate the output of an automotive radar sensor for various driving scenarios. - Radar Signal Simulation and Processing for Automated Driving
Model the hardware, signal processing, and propagation environment of a radar for a driving scenario. - Simulate Radar Ghosts Due to Multipath Return
Generate ghost targets that occur when signal energy is reflected off another target before returning to the radar. - Model Vision Sensor Detections
Model and simulate the output of an automotive vision sensor for various driving scenarios. - Simulate Inertial Sensor Readings from a Driving Scenario (Navigation Toolbox)
Generate synthetic sensor data from IMU, GPS, and wheel encoders using driving scenario generation tools from Automated Driving Toolbox™.
注目の例
Scenario Generation from Recorded Vehicle Data
Automatically generate virtual driving scenarios from recorded vehicle data.

Automatic Scenario Generation
Automate scenario generation by using a drivingScenario object. In this example, you will automate:
Generate High Definition Scene from Lane Detections and OpenStreetMap
Generate HD road scene using recorded lane detections, GPS data, and OpenStreetMap® data.

Generate Scenario from Actor Track Data and GPS Data
Generate ASAM OpenSCENARIO® v1.0 file using recorded actor tracklist and GPS data.

Generate Scenario Variants for Testing AEB Pedestrian Systems
Generate scenario variants to test automated emergency braking (AEB) system using car-to-pedestrian European New Car Assessment Programme (Euro NCAP) test scenario.