trajectory
ドライビング シナリオでアクターまたは車両の軌跡を作成
構文
説明
trajectory 関数は、各ウェイポイントにおけるアクターの速度値または到着時間のいずれかに基づいて軌跡を作成します。既定では、関数はステアリング位置が後車軸にある車両の軌跡を作成します。ステアリング位置が前車軸にある車両の軌跡を作成するには、名前と値の引数 ReferenceSteerPosition を使用します。
アクターの速度情報からの軌跡
trajectory( は、一連のウェイポイントから、アクターまたは車両 ac,waypoints)ac の軌跡を作成します。
メモ
関数 trajectory は、ウェイポイント間で加速度に不連続性がある軌跡を生成するため、加加速度が大きくなります。滑らかで加加速度の制限された軌跡を生成するには、代わりに関数 smoothTrajectory を使用します。
trajectory(___, は、前述の構文の任意の引数の組み合わせに加え、1 つ以上の名前と値の引数を使用してオプションを指定します。たとえば、Name=Value)Course=course は、各ウェイポイントにおけるアクターまたは車両のステアリング方向を定義するコース角 course を指定します。
アクターの到着時間からの軌跡
R2024b 以降
trajectory( は、各ウェイポイントにおけるアクターの到着時間 ac,waypoints,TimeOfArrival=timeOfArrival)timeOfArrival を使用して、一連のウェイポイント waypoints からアクターまたは車両 ac の軌跡を作成します。
trajectory( は、1 つ以上の名前と値の引数を使用してオプションを指定します。たとえば、ac,waypoints,TimeOfArrival=timeOfArrival,Name=Value)MotionDirection=motionDirection は、各ウェイポイントにおけるアクターの動く方向 motionDirection を指定します。
例
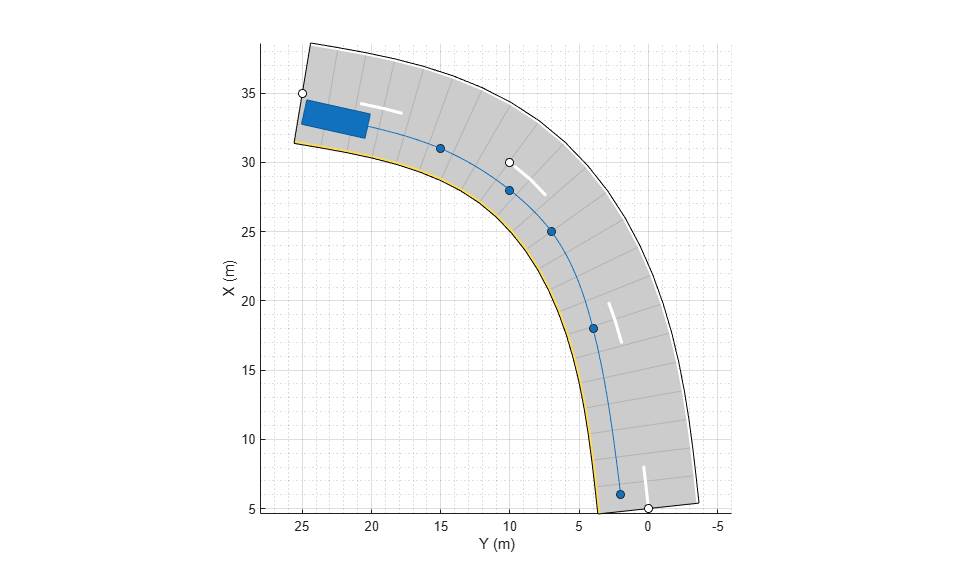
ドライビング シナリオを作成して、曲線の 2 車線道路を追加します。
scenario = drivingScenario('SampleTime',0.05); roadcenters = [5 0; 30 10; 35 25]; lspec = lanespec(2); road(scenario,roadcenters,'Lanes',lspec);
車両をシナリオに追加します。車両が速度を変えながら曲線を走行する軌跡を設定します。
v = vehicle(scenario,'ClassID',1);
waypoints = [6 2; 18 4; 25 7; 28 10; 31 15; 33 22];
speeds = [30 10 5 5 10 30];
trajectory(v,waypoints,speeds)
シナリオをプロットしてシミュレーションを実行します。車両が曲線に沿って走行する際に、どのように減速するか観察します。
plot(scenario,'Waypoints','on','RoadCenters','on') while advance(scenario) pause(0.1) end
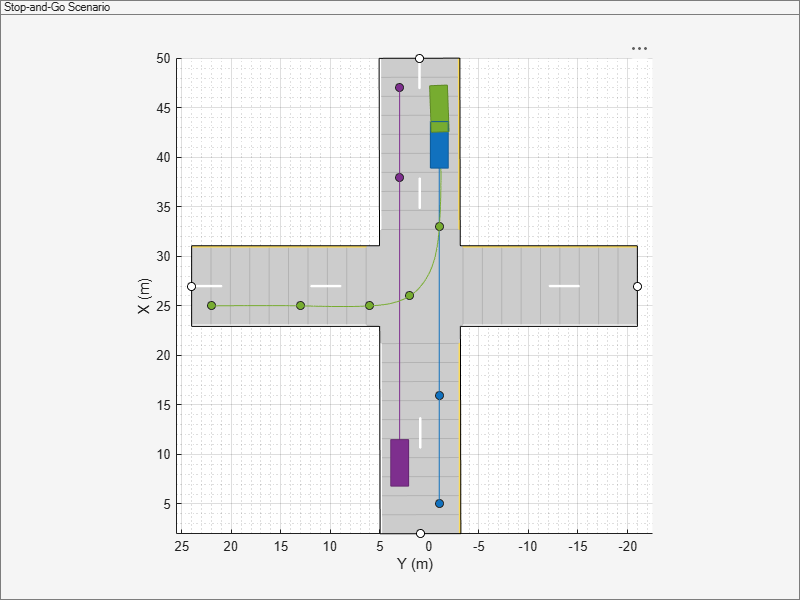
直角に交差する 2 つの 2 車線道路で構成されるドライビング シナリオを作成します。
scenario = drivingScenario('StopTime',2.75); roadCenters = [50 1 0; 2 0.9 0]; laneSpecification = lanespec(2,'Width',4); road(scenario,roadCenters,'Lanes',laneSpecification); roadCenters = [27 24 0; 27 -21 0]; road(scenario,roadCenters,'Lanes',laneSpecification);
自車をシナリオに追加します。ウェイポイントと、各ウェイポイントにおける車両の速度値を指定します。2 番目のウェイポイントにおける車両の待機時間を設定します。自車が指定されたウェイポイントを指定された速度で通過する軌跡を生成します。
egoVehicle = vehicle(scenario,'ClassID',1,'Position',[5 -1 0]); waypoints = [5 -1 0; 16 -1 0; 40 -1 0]; speed = [30; 0; 30]; waittime = [0; 0.3; 0]; trajectory(egoVehicle,waypoints,speed,waittime);
自動車をシナリオに追加します。ウェイポイントと、各ウェイポイントにおける自動車の速度値を指定します。2 番目のウェイポイントにおける自動車の待機時間を設定します。自動車が指定されたウェイポイントを指定された速度で通過する軌跡を生成します。
car = vehicle(scenario,'ClassID',1,'Position',[48 4 0],'PlotColor',[0.494 0.184 0.556], 'Name','Car'); waypoints = [47 3 0; 38 3 0; 10 3 0]; speed = [30; 0; 30]; waittime = [0; 0.3; 0]; trajectory(car,waypoints,speed,waittime);
救急車をシナリオに追加します。救急車が指定されたウェイポイントを一定の速度で通過する軌跡を生成します。
ambulance = vehicle(scenario,'ClassID',6,'Position',[25 22 0],'PlotColor',[0.466 0.674 0.188],'Name','Ambulance');
Warning: Class ID 6 is not supported for a vehicle. The drivingScenario object created an actor instead. ClassID of vehicle must be one of these values: 1 (Car) or 2 (Truck).
waypoints = [25 22 0; 25 13 0; 25 6 0; 26 2 0; 33 -1 0; 45 -1 0]; speed = 25; trajectory(ambulance,waypoints,speed);
シナリオをプロットするカスタム Figure ウィンドウを作成します。
fig = figure; set(fig,'Position',[0,0,800,600]); movegui(fig,'center'); hViewPnl = uipanel(fig,'Position',[0 0 1 1],'Title','Stop-and-Go Scenario'); hPlt = axes(hViewPnl);
シナリオをプロットしてシミュレーションを実行します。自車と自動車は、指定された待機時間について一時停止して、救急車との衝突を回避します。
plot(scenario,'Waypoints','on','RoadCenters','on','Parent',hPlt) while advance(scenario) pause(0.1) end
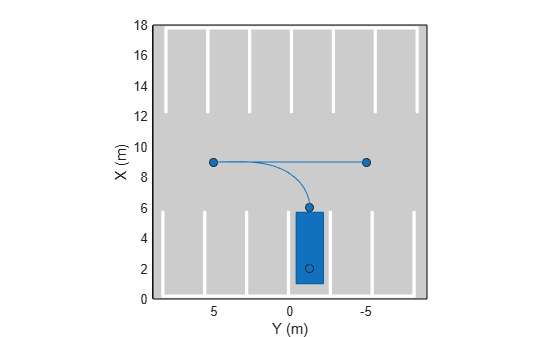
自動車が後退走行し、バックで駐車スペースに入るドライビング シナリオをシミュレーションします。
駐車場を含むドライビング シナリオを作成します。
scenario = drivingScenario; vertices = [0 9; 18 9; 18 -9; 0 -9]; parkingLot(scenario,vertices,ParkingSpace=parkingSpace);
自動車を作成してその軌跡を定義します。自動車は前進走行し、停止してから、後退走行し、バックで駐車スペースに入ります。駐車スペースに入るとき、自動車は開始地点から 90 度反時計回りのヨー方向の角度をもちます。
car = vehicle(scenario,ClassID=1); waypoints = [9 -5; 9 5; 6 -1.3; 2 -1.3]; speed = [3; 0; -2; 0]; yaw = [90 90 180 180]; smoothTrajectory(car,waypoints,speed,Yaw=yaw)
ドライビング シナリオをプロットし、軌跡のウェイポイントを表示します。
plot(scenario,Waypoints="on") while advance(scenario) pause(scenario.SampleTime) end
交差点で直角に右折する歩行者の軌跡を定義します。
ドライビング シナリオを作成します。交差点を定義する道路セグメントを追加します。
scenario = drivingScenario; roadCenters = [0 10; 0 -10]; road(scenario,roadCenters); road(scenario,flip(roadCenters,2));
歩行者アクターをシナリオに追加します。
pedestrian = actor(scenario, ... 'ClassID',4, ... 'Length',0.24, ... 'Width',0.45, ... 'Height',1.7, ... 'Position',[-9 0 0], ... 'RCSPattern',[-8 -8; -8 -8], ... 'Mesh', driving.scenario.pedestrianMesh, ... 'Name','Pedestrian');
歩行者の軌跡を定義します。歩行者は交差点に近付き、短時間一時停止してから、交差点で直角に右折します。直角右折を定義するには、交差点で互いに近接する 2 つのウェイポイントを指定します。これらのウェイポイントについて、2 番目のウェイポイントのヨー方向の角度を、最初のウェイポイントから 90 度の角度に指定します。
waypoints = [-9 0; -0.25 0; 0 -0.25; 0 -9];
speed = [1.5; 0; 0.5; 1.5];
yaw = [0; 0; -90; -90];
waittime = [0; 0.2; 0; 0];
trajectory(pedestrian,waypoints,speed,waittime,'Yaw', yaw);
ドライビング シナリオをプロットし、歩行者のウェイポイントを表示します。
plot(scenario,'Waypoints','on') while advance(scenario) pause(0.001) end

R2024b 以降
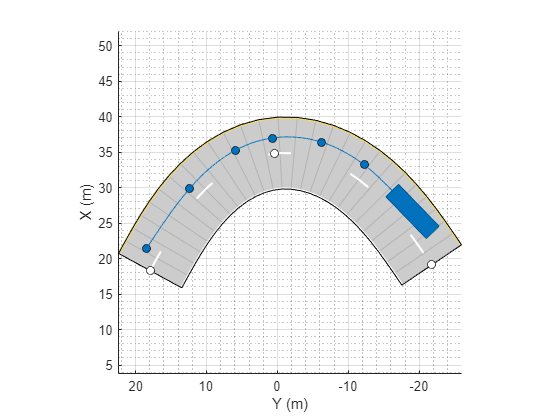
ドライビング シナリオ オブジェクトを作成します。
scenario = drivingScenario;
ドライビング シナリオに道路と車線のセグメントを追加します。
roadCenters = [18.3 17.94 0;
34.8 0.45 0;
19.1 -21.74 0];
laneSpecification = lanespec(2,Width=5);
road(scenario,roadCenters,Lanes=laneSpecification,Name="Road")車両をウェイポイントおよび対応するアクターの到着時間と共にシナリオに追加します。アクターの到着時間を使用して軌跡を作成します。
egoVehicle = vehicle(scenario, ... ClassID=2, ... Length=8.2, ... Width=2.5, ... Height=3.5, ... Position=[21.4185032445924 18.4409098505372 0.01], ... RearOverhang=1, ... FrontOverhang=0.9, ... Mesh=driving.scenario.truckMesh, ... Name="Truck"); waypoints = [21.4185032445924 18.4409098505372 0.01; 29.9 12.34 0.01; 35.3 5.85 0.01; 36.99 0.75 0.01; 36.4 -6.25 0.01; 33.2 -12.24 0.01; 28.6 -17.14 0.01]; actorArrivalTime = [0 0.2 0.5 0.8 1 1.3 1.5]'; trajectory(egoVehicle,waypoints,TimeOfArrival=actorArrivalTime)
シナリオをプロットし、シミュレーションを実行します。
plot(scenario,Waypoints="on",RoadCenters="on") while advance(scenario) pause(0.1) end
R2024b 以降
ドライビング シナリオ オブジェクトを作成します。
scenario1 = drivingScenario(StopTime=1.25);
ドライビング シナリオに道路と車線のセグメントを追加します。
laneSpecification = lanespec(2,Width=5);
roadCenters = [27 24 0;
27 -3 0;
47 16 0];
road(scenario1,roadCenters,Lanes=laneSpecification);車両のパラメーターをそのウェイポイントおよび相対速度値と共に指定します。
egoCar1 = vehicle(scenario1,ClassID=1,Position=[22 19 0], ... PlotColor=[0.494 0.184 0.556],Name="Car1",Length=10,FrontOverhang=1.8); waypoints = [22 19 0; 19 13 0; 19 6 0; 20 2 0; 33 -6 0; 48 10 0]; speed = 25;
前車軸をステアリングの基準にして車両の軌跡を作成します。
trajectory(egoCar1,waypoints,speed,ReferenceSteerPosition="front-axle")別のドライビング シナリオ オブジェクトを作成します。
scenario2 = drivingScenario(StopTime=1.25);
ドライビング シナリオに、前のドライビング シナリオに追加したものと同じ道路と車線のセグメントを追加します。
road(scenario2,roadCenters,Lanes=laneSpecification);
前のドライビング シナリオに追加したものと同じ車両のパラメーターを、そのウェイポイントおよび相対速度値と共に指定します。
egoCar2 = vehicle(scenario2,ClassID=1,Position=[22 19 0], ... PlotColor=[0.466 0.674 0.188],Name="Car2",Length=10,FrontOverhang=1.8);
既定の後車軸をステアリングの基準にして車両の軌跡を作成します。
trajectory(egoCar2,waypoints,speed)
シナリオのプロットとシミュレーションを行い、前車軸と後車軸の軌跡を表示します。最初のサブプロットに、前車軸のステアリングを基準にして作成される後車軸の破線の軌跡が含まれていることを観察します。
fig = figure(Visible="on"); % Ensure the figure is visible axesWidth = 0.35; % Relative width of each axes axesHeight = 0.8; % Relative height of each axes margin = 0.1; % Margin from left/right and between axes % Calculate axes positions of each subplot for equal spacing pos1 = [margin 0.1 axesWidth axesHeight]; pos2 = [1-(margin+axesWidth) 0.1 axesWidth axesHeight]; % Specify title to the first axes in the figure ax1 = axes(fig,Position=pos1); title(ax1,"Trajectory with Front-Axle Steering") % Specify title to the second axes in the figure ax2 = axes(fig,Position=pos2); title(ax2,"Trajectory with Rear-Axle Steering") % Plot and simulate the scenarios plot(scenario1,Waypoints="on",RoadCenters="on",ShowRearAxle="on",Parent=ax1) plot(scenario2,Waypoints="on",RoadCenters="on",ShowRearAxle="on",Parent=ax2) while advance(scenario1) && advance(scenario2) pause(0.1) end

入力引数
名前と値の引数
制限
前車軸ステアリングの車両の軌跡を含む
drivingScenarioオブジェクトを作成してドライビング シナリオ デザイナー アプリにインポートすると、このアプリはそれを後車軸の軌跡をもつシナリオとして表現します。入力の
drivingScenarioオブジェクトに前車軸ステアリングの車両の軌跡が含まれており、それをstartRoadRunnerForScenario関数を使用して RoadRunner にインポートすると、RoadRunner シナリオはその車両の軌跡を車両の中心にステアリングがあるものとして表現します。
ヒント
特定の車体位置を基準とする車両の位置を取得するには、
getReferencePosition関数を使用します。少なくとも 1 つの車両の前車軸の軌跡がドライビング シナリオに含まれている場合、
record関数によって返されるActorPoses構造体のFrontAxlePositionフィールドから前車軸の位置を取得できます。前車軸の軌跡がドライビング シナリオに含まれている場合に後車軸と前車軸の両方の軌跡をプロットするには、
plot関数の名前と値の引数ShowRearAxleを"on"として指定します。
アルゴリズム
関数 trajectory は、シナリオ内でアクターが従う軌跡を作成します。軌跡は、オブジェクトが従うパスと、パスに沿ったオブジェクトの速度で構成されます。パスは、N 個の 2 次元または 3 次元のウェイポイントを使用して指定します。ウェイポイント間の N – 1 個のセグメントはそれぞれ曲線を定義し、その曲率はセグメントに沿って、距離に対して直線的に変化します。関数は、ウェイポイントの両側の曲率を一致させることにより、区分的な "クロソイド" 曲線をウェイポイントの (x, y) 座標に近似します。閉じていない曲線の場合、最初と最後のウェイポイントの曲率はゼロです。最初と最後のウェイポイントが一致する場合は、端点の前後の曲率が一致します。軌跡の z 座標は、形状維持区分的 3 次曲線を使用して内挿されます。
生成される軌跡は、ウェイポイント間の各セグメントの区分的な等加速度プロファイルとなります。これらのセグメントの間には、加速度の不連続性があります。加速度の不連続性を回避するには、代わりに関数 smoothTrajectory を使用して軌跡を生成します。