plot
ドライビング シナリオをプロット
説明
plot( は、1 つ以上の名前と値のペアを使用してオプションを指定します。たとえば、これらのオプションを使用して、道路の中心とアクターのウェイポイントをプロット上に表示できます。scenario,Name,Value)
例
シナリオのワールド座標で指定された 8 の字形の道路を含むドライビング シナリオを作成します。シナリオのワールド座標を、自車座標系に変換します。
空のドライビング シナリオを作成します。
scenario = drivingScenario;
8 の字形の道路をシナリオに追加します。シナリオを表示します。
roadCenters = [0 0 1
20 -20 1
20 20 1
-20 -20 1
-20 20 1
0 0 1];
roadWidth = 3;
bankAngle = [0 15 15 -15 -15 0];
road(scenario,roadCenters,roadWidth,bankAngle);
plot(scenario)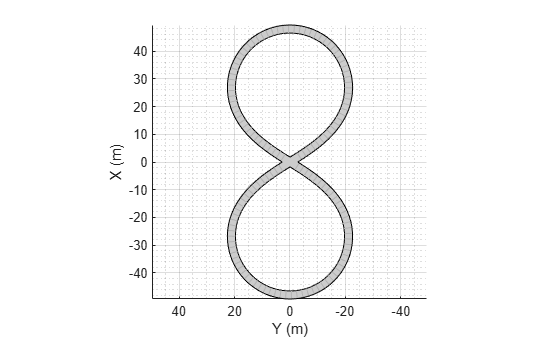
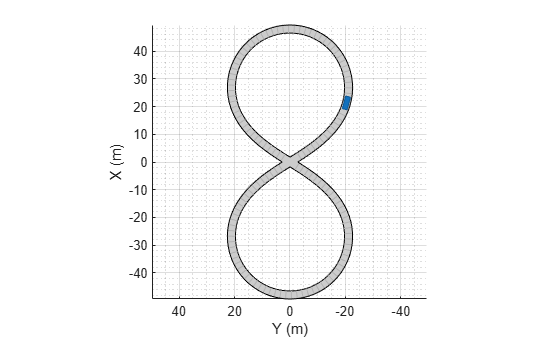
自車をシナリオに追加します。車両をワールド座標 (20, -20) に配置して、向きを -15 度のヨー角に設定します。
ego = actor(scenario,'ClassID',1,'Position',[20 -20 0],'Yaw',-15);
Warning: Class ID 1 is not supported for an actor. The drivingScenario object created a vehicle instead. ClassID of actor must be one of these values: 3 (Bicycle), 4 (Pedestrian), 5 (Jersey Barrier), or 6 (Guardrail).
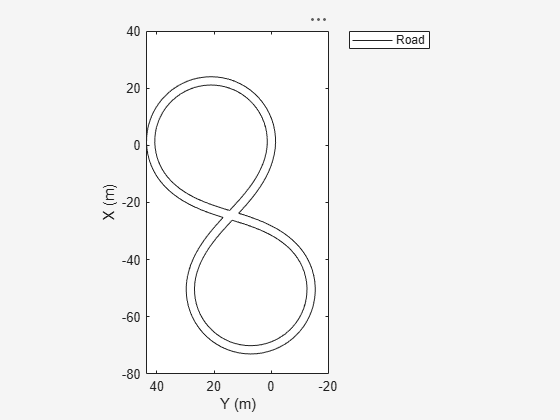
関数 roadBoundaries を使用して、道路の境界を自車座標で取得します。自車を入力引数として指定します。
rbEgo1 = roadBoundaries(ego);
結果を鳥瞰図プロット上に表示します。
bep = birdsEyePlot; lbp = laneBoundaryPlotter(bep,'DisplayName','Road'); plotLaneBoundary(lbp,rbEgo1)
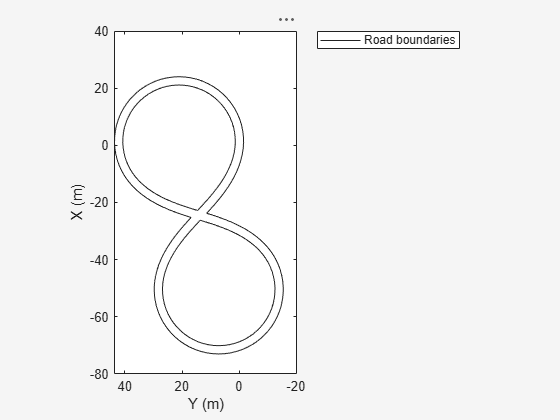
関数 roadBoundaries を使用して、道路の境界をワールド座標で取得します。シナリオを入力引数として指定します。
rbScenario = roadBoundaries(scenario);
関数 driving.scenario.roadBoundariesToEgo を使用して、道路の境界を自車座標で取得します。
rbEgo2 = driving.scenario.roadBoundariesToEgo(rbScenario,ego);
道路の境界を鳥瞰図プロット上に表示します。
bep = birdsEyePlot; lbp = laneBoundaryPlotter(bep,'DisplayName','Road boundaries'); plotLaneBoundary(lbp,{rbEgo2})
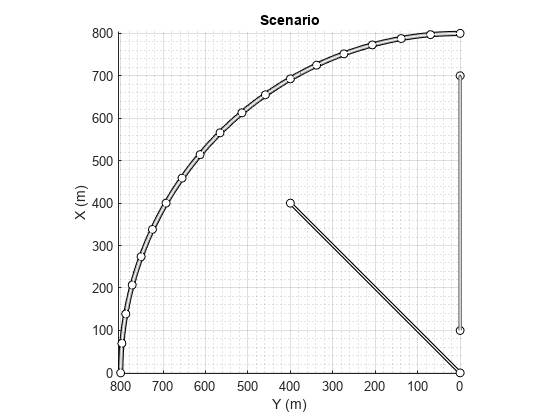
1 つの曲線道路、2 つの直線道路、2 つのアクター (車と自転車) が含まれたドライビング シナリオを作成します。どちらのアクターも 60 秒間道路に沿って移動します。
ドライビング シナリオ オブジェクトを作成します。
scenario = drivingScenario('SampleTime',0.1','StopTime',60);
半径 800 メートルの円弧に従う道路中心点を使用して、曲線道路を作成します。円弧は 0 度から開始して 90 度で終了し、5 度のインクリメントでサンプリングされます。
angs = [0:5:90]'; R = 800; roadcenters = R*[cosd(angs) sind(angs) zeros(size(angs))]; roadwidth = 10; cr = road(scenario,roadcenters,roadwidth);
両端の道路中央点を使用して、既定の幅をもつ 2 本の直線道路を追加します。最初の直線道路の両エッジに障壁を追加します。
roadcenters = [700 0 0; 100 0 0]; sr1 = road(scenario,roadcenters); barrier(scenario,sr1) barrier(scenario,sr1,'RoadEdge','left') roadcenters = [400 400 0; 0 0 0]; road(scenario,roadcenters);
道路の境界を取得します。
rbdry = roadBoundaries(scenario);
車と自転車をシナリオに追加します。1 つ目の直線道路の最初の位置に車を配置します。
car = vehicle(scenario,'ClassID',1,'Position',[700 0 0], ... 'Length',3,'Width',2,'Height',1.6);
道路を進んだ先に自転車を配置します。
bicycle = actor(scenario,'ClassID',3,'Position',[706 376 0]', ... 'Length',2,'Width',0.45,'Height',1.5);
シナリオをプロットします。
plot(scenario,'Centerline','on','RoadCenters','on'); title('Scenario');
アクターの姿勢とプロファイルを表示します。
allActorPoses = actorPoses(scenario)
allActorPoses=242×1 struct array with fields:
ActorID
Position
Velocity
Roll
Pitch
Yaw
AngularVelocity
allActorProfiles = actorProfiles(scenario)
allActorProfiles=242×1 struct array with fields:
ActorID
ClassID
Length
Width
Height
OriginOffset
MeshVertices
MeshFaces
RCSPattern
RCSAzimuthAngles
RCSElevationAngles
このシナリオには障壁があり、各障壁セグメントがアクターと見なされているため、関数 actorPoses および関数 actorProfiles は、すべての静止アクターと非静止アクターの姿勢を返します。車両や二輪車など非静止アクターの姿勢とプロファイルのみを取得するには、まず scenario.Actors.ActorID プロパティを使用して、それらの対応するアクター ID を取得します。
movableActorIDs = [scenario.Actors.ActorID];
次に、それらの ID を使用して、非静止アクターの姿勢とプロファイルのみをフィルター処理します。
movableActorPoseIndices = ismember([allActorPoses.ActorID],movableActorIDs); movableActorPoses = allActorPoses(movableActorPoseIndices)
movableActorPoses=2×1 struct array with fields:
ActorID
Position
Velocity
Roll
Pitch
Yaw
AngularVelocity
movableActorProfiles = allActorProfiles(movableActorPoseIndices)
movableActorProfiles=2×1 struct array with fields:
ActorID
ClassID
Length
Width
Height
OriginOffset
MeshVertices
MeshFaces
RCSPattern
RCSAzimuthAngles
RCSElevationAngles
R2024b 以降
ドライビング シナリオ オブジェクトを作成します。
scenario1 = drivingScenario(StopTime=1.25);
ドライビング シナリオに道路と車線のセグメントを追加します。
laneSpecification = lanespec(2,Width=5);
roadCenters = [27 24 0;
27 -3 0;
47 16 0];
road(scenario1,roadCenters,Lanes=laneSpecification);車両のパラメーターをそのウェイポイントおよび相対速度値と共に指定します。
egoCar1 = vehicle(scenario1,ClassID=1,Position=[22 19 0], ... PlotColor=[0.494 0.184 0.556],Name="Car1",Length=10,FrontOverhang=1.8); waypoints = [22 19 0; 19 13 0; 19 6 0; 20 2 0; 33 -6 0; 48 10 0]; speed = 25;
前車軸をステアリングの基準にして車両の軌跡を作成します。
trajectory(egoCar1,waypoints,speed,ReferenceSteerPosition="front-axle")別のドライビング シナリオ オブジェクトを作成します。
scenario2 = drivingScenario(StopTime=1.25);
ドライビング シナリオに、前のドライビング シナリオに追加したものと同じ道路と車線のセグメントを追加します。
road(scenario2,roadCenters,Lanes=laneSpecification);
前のドライビング シナリオに追加したものと同じ車両のパラメーターを、そのウェイポイントおよび相対速度値と共に指定します。
egoCar2 = vehicle(scenario2,ClassID=1,Position=[22 19 0], ... PlotColor=[0.466 0.674 0.188],Name="Car2",Length=10,FrontOverhang=1.8);
既定の後車軸をステアリングの基準にして車両の軌跡を作成します。
trajectory(egoCar2,waypoints,speed)
シナリオのプロットとシミュレーションを行い、前車軸と後車軸の軌跡を表示します。最初のサブプロットに、前車軸のステアリングを基準にして作成される後車軸の破線の軌跡が含まれていることを観察します。
fig = figure(Visible="on"); % Ensure the figure is visible axesWidth = 0.35; % Relative width of each axes axesHeight = 0.8; % Relative height of each axes margin = 0.1; % Margin from left/right and between axes % Calculate axes positions of each subplot for equal spacing pos1 = [margin 0.1 axesWidth axesHeight]; pos2 = [1-(margin+axesWidth) 0.1 axesWidth axesHeight]; % Specify title to the first axes in the figure ax1 = axes(fig,Position=pos1); title(ax1,"Trajectory with Front-Axle Steering") % Specify title to the second axes in the figure ax2 = axes(fig,Position=pos2); title(ax2,"Trajectory with Rear-Axle Steering") % Plot and simulate the scenarios plot(scenario1,Waypoints="on",RoadCenters="on",ShowRearAxle="on",Parent=ax1) plot(scenario2,Waypoints="on",RoadCenters="on",ShowRearAxle="on",Parent=ax2) while advance(scenario1) && advance(scenario2) pause(0.1) end

入力引数
名前と値の引数
ヒント
任意のプロットを回転するには、Figure ウィンドウで、[ビュー] 、 [カメラ ツール バー] を選択します。