chasePlot
自己を中心とした射影パースペクティブのプロット
説明
chasePlot( は、アクター ac)ac のパースペクティブからドライビング シナリオをプロットします。このプロットは "追跡プロット" と呼ばれ、自己を中心とした射影パースペクティブをもちます。ここでは、ビューはアクターのすぐ後ろに配置されます。
chasePlot( は、1 つ以上の名前と値のペアを使用してオプションを指定します。たとえば、道路の中心とアクターのウェイポイントをプロット上に表示できます。ac,Name,Value)
例
1 台の自動車が S 字カーブ上を走行するドライビング シナリオをシミュレートします。車線境界線を作成してプロットします。
S 字カーブをもつ 1 本の道路を使用して、ドライビング シナリオを作成します。
scenario = drivingScenario('StopTime',3);
roadcenters = [-35 20 0; -20 -20 0; 0 0 0; 20 20 0; 35 -20 0];
車線を作成して道路に追加します。
lm = [laneMarking('Solid','Color','w'); ... laneMarking('Dashed','Color','y'); ... laneMarking('Dashed','Color','y'); ... laneMarking('Solid','Color','w')]; ls = lanespec(3,'Marking',lm); road(scenario,roadcenters,'Lanes',ls);
自車を追加し、そのウェイポイントから軌跡を指定します。自動車は、既定で 30 メートル/秒で走行します。
car = vehicle(scenario, ... 'ClassID',1, ... 'Position',[-35 20 0]); waypoints = [-35 20 0; -20 -20 0; 0 0 0; 20 20 0; 35 -20 0]; smoothTrajectory(car,waypoints);
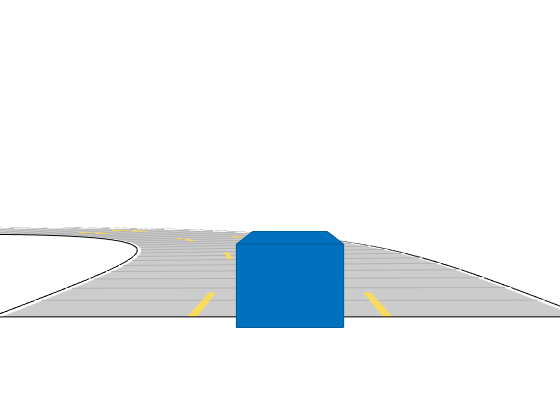
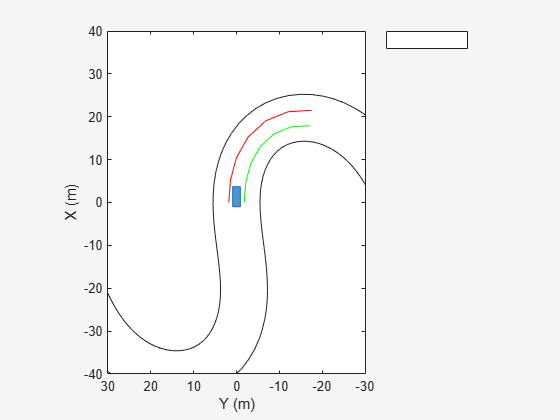
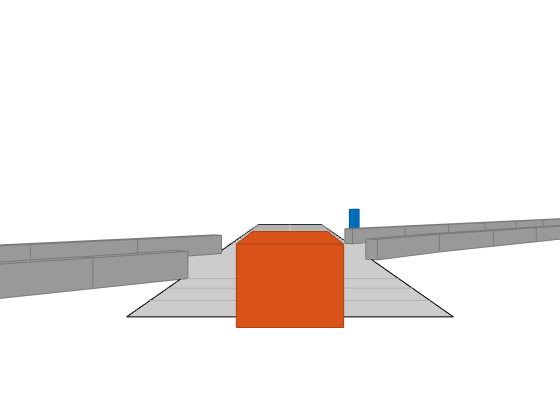
シナリオ、および対応する追跡プロットをプロットします。
plot(scenario)
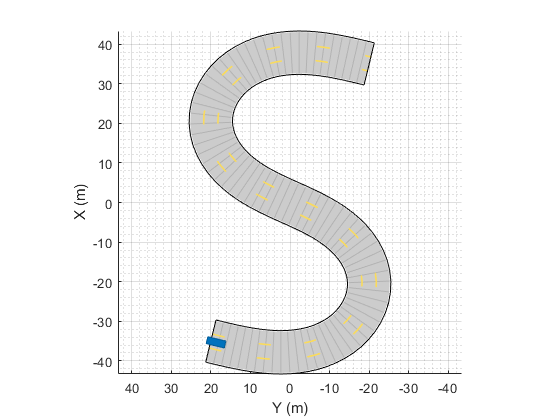
chasePlot(car)
シミュレーション ループを実行します。
鳥瞰図プロットを初期化し、アウトライン プロッター、左車線と右車線の境界線プロッター、および道路境界線プロッターを作成します。
道路の境界線と四角形のアウトラインを取得します。
車両の左右にある車線境界線を取得します。
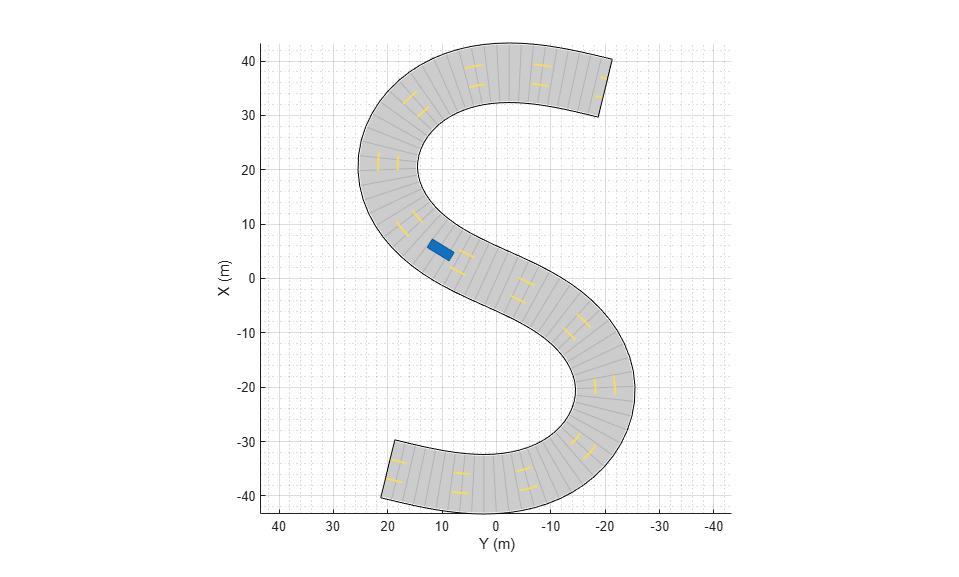
シミュレーションを進めてプロッターを更新します。
bep = birdsEyePlot('XLim',[-40 40],'YLim',[-30 30]); olPlotter = outlinePlotter(bep); lblPlotter = laneBoundaryPlotter(bep,'Color','r','LineStyle','-'); lbrPlotter = laneBoundaryPlotter(bep,'Color','g','LineStyle','-'); rbsEdgePlotter = laneBoundaryPlotter(bep); legend('off'); while advance(scenario) rbs = roadBoundaries(car); [position,yaw,length,width,originOffset,color] = targetOutlines(car); lb = laneBoundaries(car,'XDistance',0:5:30,'LocationType','Center', ... 'AllBoundaries',false); plotLaneBoundary(rbsEdgePlotter,rbs) plotLaneBoundary(lblPlotter,{lb(1).Coordinates}) plotLaneBoundary(lbrPlotter,{lb(2).Coordinates}) plotOutline(olPlotter,position,yaw,length,width, ... 'OriginOffset',originOffset,'Color',color) end
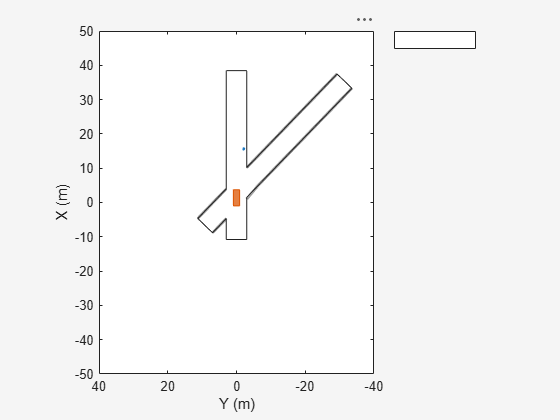
ドライビング シナリオを作成し、シミュレーションの進行に伴うターゲット アウトラインの変化を示します。
2 つの交差する直線道路で構成されたドライビング シナリオを作成します。1 つ目の道路セグメントの長さは 45 メートルです。2 つ目の直線道路は、長さが 32 メートルで、両端にジャージ障壁があり、1 つ目の道路と交差します。1 つ目の道路に沿って秒速 12.0 メートルで移動している車が、秒速 2.0 メートルで交差点を現在渡っている歩行者に近づいていきます。
scenario = drivingScenario('SampleTime',0.1,'StopTime',1); road1 = road(scenario,[-10 0 0; 45 -20 0]); road2 = road(scenario,[-10 -10 0; 35 10 0]); barrier(scenario,road1) barrier(scenario,road1,'RoadEdge','left') ped = actor(scenario,'ClassID',4,'Length',0.4,'Width',0.6,'Height',1.7); car = vehicle(scenario,'ClassID',1); pedspeed = 2.0; carspeed = 12.0; smoothTrajectory(ped,[15 -3 0; 15 3 0],pedspeed); smoothTrajectory(car,[-10 -10 0; 35 10 0],carspeed);
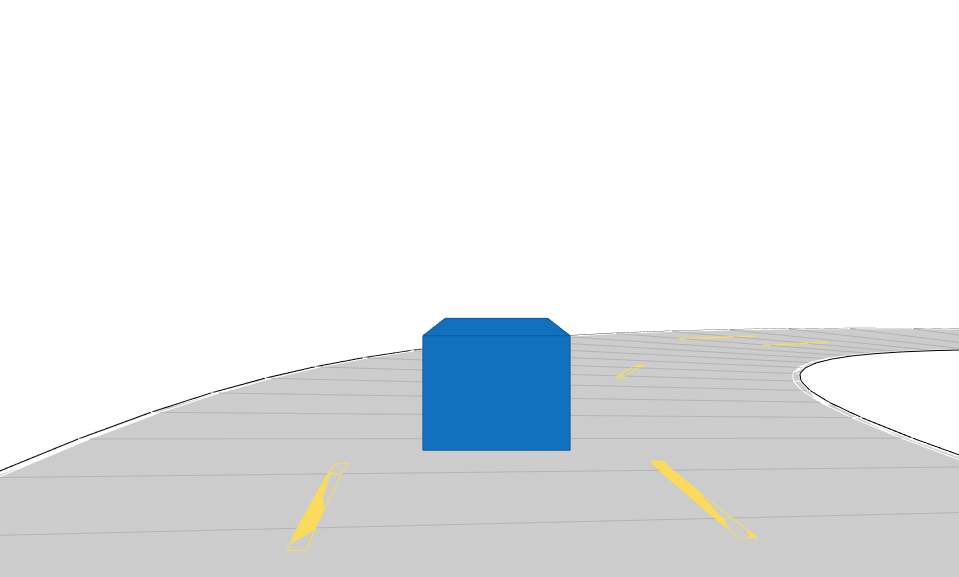
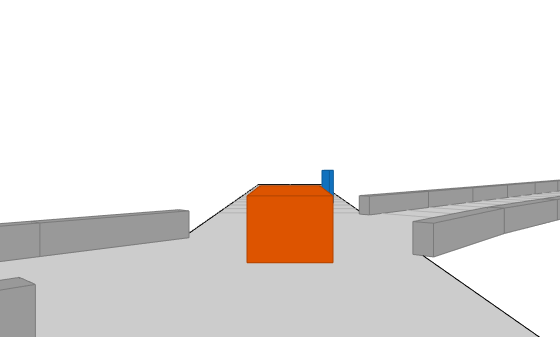
車両の自己を中心とした追跡プロットを作成します。
chasePlot(car,'Centerline','on')
空の鳥瞰図プロットを作成し、アウトライン プロッターおよび車線境界線プロッターを追加します。次に、シミュレーションを実行します。各シミュレーション ステップは以下のとおりです。
追跡プロットを更新して、道路の境界およびターゲット アウトラインを表示する。
鳥瞰図プロットを更新して、更新した道路の境界およびターゲット アウトラインを表示する。プロットのパースペクティブは常に、自車が基準となっています。
bepPlot = birdsEyePlot('XLim',[-50 50],'YLim',[-40 40]); outlineplotter = outlinePlotter(bepPlot); laneplotter = laneBoundaryPlotter(bepPlot); legend('off') while advance(scenario) rb = roadBoundaries(car); [position,yaw,length,width,originOffset,color] = targetOutlines(car); [bposition,byaw,blength,bwidth,boriginOffset,bcolor,barrierSegments] = targetOutlines(car,'Barriers'); plotLaneBoundary(laneplotter,rb) plotOutline(outlineplotter,position,yaw,length,width, ... 'OriginOffset',originOffset,'Color',color) plotBarrierOutline(outlineplotter,barrierSegments,bposition,byaw,blength,bwidth, ... 'OriginOffset',boriginOffset,'Color',bcolor) pause(0.01) end
入力引数
名前と値の引数
バージョン履歴
R2017a で導入