drivingScenario
ドライビング シナリオの作成
説明
drivingScenario オブジェクトは、ドライビング シナリオの道路、駐車場、車両、歩行者、障壁、その他の要素が含まれた 3-D アリーナを表します。このオブジェクトを使用して、現実的な交通シナリオをモデル化し、コントローラーまたはセンサー フュージョン アルゴリズムをテストするための合成検出を生成します。
道路を追加するには、関数
roadを使用します。道路に車線を指定するには、lanespecオブジェクトを作成します。関数roadNetworkを使用して、サードパーティの道路ネットワークから道路をインポートすることもできます。駐車場を追加するには、関数
parkingLotを使用します。アクター (車、歩行者、自転車など) を追加するには、関数
actorを使用します。車両専用に設計されたプロパティを備えたアクターを追加するには、関数vehicleを使用します。障壁を追加するには、関数barrierを使用します。車両および障壁を含む、すべてのアクターは一意のアクター ID をもつ直方体 (箱の形状) でモデル化されます。シナリオをシミュレートするために、ループ内で関数
advanceを呼び出します。これにより、一度に 1 つのタイム ステップずつシミュレーションを進めます。
ドライビング シナリオ デザイナー アプリを使用してドライビング シナリオを対話的に作成することもできます。また、アプリから drivingScenario オブジェクトをエクスポートして、アプリまたは Simulink® で使用するための複数のシナリオ バリエーションを生成できます。詳細については、プログラムでのドライビング シナリオのバリエーションの作成を参照してください。
作成
説明
scenario = drivingScenario
scenario = drivingScenario(Name,Value)SampleTime、StopTime、および GeoReference の各プロパティを設定します。たとえば、drivingScenario('GeoReference',[42.3 -71.0 0]) は、シーンの地理的原点を緯度と経度の座標 (42.3, –71.0)、および高度 0 に設定します。
プロパティ
オブジェクト関数
例
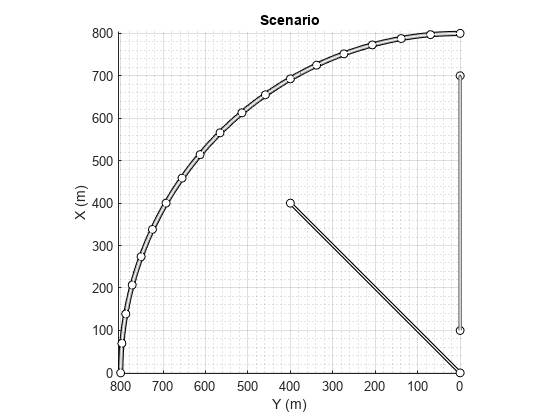
1 つの曲線道路、2 つの直線道路、2 つのアクター (車と自転車) が含まれたドライビング シナリオを作成します。どちらのアクターも 60 秒間道路に沿って移動します。
ドライビング シナリオ オブジェクトを作成します。
scenario = drivingScenario('SampleTime',0.1','StopTime',60);
半径 800 メートルの円弧に従う道路中心点を使用して、曲線道路を作成します。円弧は 0 度から開始して 90 度で終了し、5 度のインクリメントでサンプリングされます。
angs = [0:5:90]'; R = 800; roadcenters = R*[cosd(angs) sind(angs) zeros(size(angs))]; roadwidth = 10; cr = road(scenario,roadcenters,roadwidth);
両端の道路中央点を使用して、既定の幅をもつ 2 本の直線道路を追加します。最初の直線道路の両エッジに障壁を追加します。
roadcenters = [700 0 0; 100 0 0]; sr1 = road(scenario,roadcenters); barrier(scenario,sr1) barrier(scenario,sr1,'RoadEdge','left') roadcenters = [400 400 0; 0 0 0]; road(scenario,roadcenters);
道路の境界を取得します。
rbdry = roadBoundaries(scenario);
車と自転車をシナリオに追加します。1 つ目の直線道路の最初の位置に車を配置します。
car = vehicle(scenario,'ClassID',1,'Position',[700 0 0], ... 'Length',3,'Width',2,'Height',1.6);
道路を進んだ先に自転車を配置します。
bicycle = actor(scenario,'ClassID',3,'Position',[706 376 0]', ... 'Length',2,'Width',0.45,'Height',1.5);
シナリオをプロットします。
plot(scenario,'Centerline','on','RoadCenters','on'); title('Scenario');
アクターの姿勢とプロファイルを表示します。
allActorPoses = actorPoses(scenario)
allActorPoses=242×1 struct array with fields:
ActorID
Position
Velocity
Roll
Pitch
Yaw
AngularVelocity
allActorProfiles = actorProfiles(scenario)
allActorProfiles=242×1 struct array with fields:
ActorID
ClassID
Length
Width
Height
OriginOffset
MeshVertices
MeshFaces
RCSPattern
RCSAzimuthAngles
RCSElevationAngles
このシナリオには障壁があり、各障壁セグメントがアクターと見なされているため、関数 actorPoses および関数 actorProfiles は、すべての静止アクターと非静止アクターの姿勢を返します。車両や二輪車など非静止アクターの姿勢とプロファイルのみを取得するには、まず scenario.Actors.ActorID プロパティを使用して、それらの対応するアクター ID を取得します。
movableActorIDs = [scenario.Actors.ActorID];
次に、それらの ID を使用して、非静止アクターの姿勢とプロファイルのみをフィルター処理します。
movableActorPoseIndices = ismember([allActorPoses.ActorID],movableActorIDs); movableActorPoses = allActorPoses(movableActorPoseIndices)
movableActorPoses=2×1 struct array with fields:
ActorID
Position
Velocity
Roll
Pitch
Yaw
AngularVelocity
movableActorProfiles = allActorProfiles(movableActorPoseIndices)
movableActorProfiles=2×1 struct array with fields:
ActorID
ClassID
Length
Width
Height
OriginOffset
MeshVertices
MeshFaces
RCSPattern
RCSAzimuthAngles
RCSElevationAngles
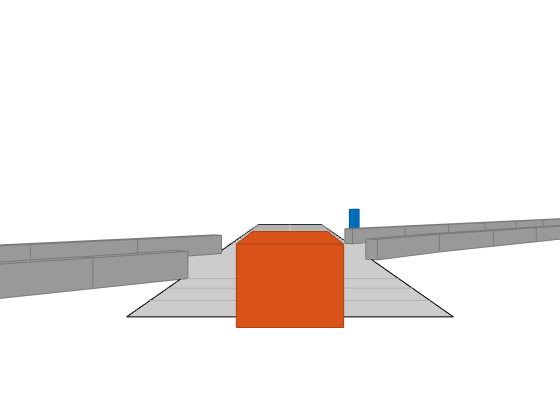
ドライビング シナリオを作成し、シミュレーションの進行に伴うターゲット アウトラインの変化を示します。
2 つの交差する直線道路で構成されたドライビング シナリオを作成します。1 つ目の道路セグメントの長さは 45 メートルです。2 つ目の直線道路は、長さが 32 メートルで、両端にジャージ障壁があり、1 つ目の道路と交差します。1 つ目の道路に沿って秒速 12.0 メートルで移動している車が、秒速 2.0 メートルで交差点を現在渡っている歩行者に近づいていきます。
scenario = drivingScenario('SampleTime',0.1,'StopTime',1); road1 = road(scenario,[-10 0 0; 45 -20 0]); road2 = road(scenario,[-10 -10 0; 35 10 0]); barrier(scenario,road1) barrier(scenario,road1,'RoadEdge','left') ped = actor(scenario,'ClassID',4,'Length',0.4,'Width',0.6,'Height',1.7); car = vehicle(scenario,'ClassID',1); pedspeed = 2.0; carspeed = 12.0; smoothTrajectory(ped,[15 -3 0; 15 3 0],pedspeed); smoothTrajectory(car,[-10 -10 0; 35 10 0],carspeed);
車両の自己を中心とした追跡プロットを作成します。
chasePlot(car,'Centerline','on')
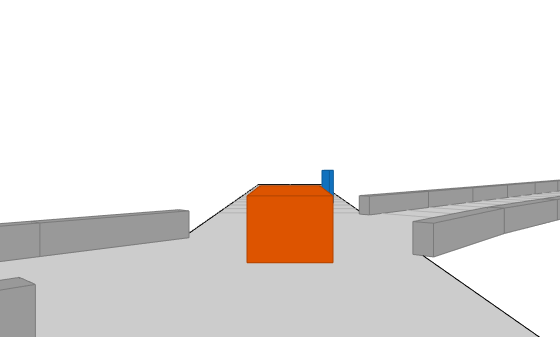
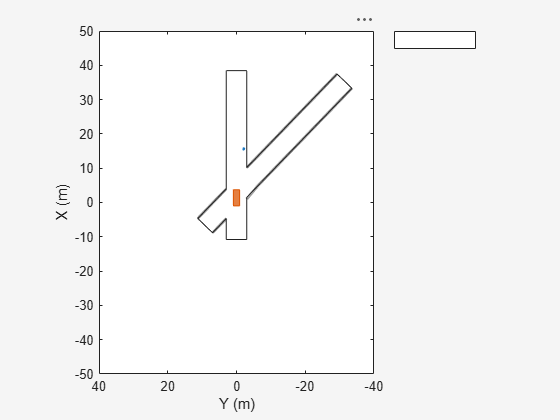
空の鳥瞰図プロットを作成し、アウトライン プロッターおよび車線境界線プロッターを追加します。次に、シミュレーションを実行します。各シミュレーション ステップは以下のとおりです。
追跡プロットを更新して、道路の境界およびターゲット アウトラインを表示する。
鳥瞰図プロットを更新して、更新した道路の境界およびターゲット アウトラインを表示する。プロットのパースペクティブは常に、自車が基準となっています。
bepPlot = birdsEyePlot('XLim',[-50 50],'YLim',[-40 40]); outlineplotter = outlinePlotter(bepPlot); laneplotter = laneBoundaryPlotter(bepPlot); legend('off') while advance(scenario) rb = roadBoundaries(car); [position,yaw,length,width,originOffset,color] = targetOutlines(car); [bposition,byaw,blength,bwidth,boriginOffset,bcolor,barrierSegments] = targetOutlines(car,'Barriers'); plotLaneBoundary(laneplotter,rb) plotOutline(outlineplotter,position,yaw,length,width, ... 'OriginOffset',originOffset,'Color',color) plotBarrierOutline(outlineplotter,barrierSegments,bposition,byaw,blength,bwidth, ... 'OriginOffset',boriginOffset,'Color',bcolor) pause(0.01) end
3 車線の道路に沿って走行している自車とターゲット車両が含まれたドライビング シナリオを作成します。Vision Detection Generator を使用して車線境界線を検出します。
scenario = drivingScenario;
車線指定を使用して 3 車線の道路を作成します。
roadCenters = [0 0 0; 60 0 0; 120 30 0];
lspc = lanespec(3);
road(scenario,roadCenters,'Lanes',lspc);
自車が 30 m/s で中央車線を追従するように指定します。
egovehicle = vehicle(scenario,'ClassID',1);
egopath = [1.5 0 0; 60 0 0; 111 25 0];
egospeed = 30;
smoothTrajectory(egovehicle,egopath,egospeed);
ターゲット車両が 40 m/s で自車の前を走行し、自車の近くで車線を変更するように指定します。
targetcar = vehicle(scenario,'ClassID',1);
targetpath = [8 2; 60 -3.2; 120 33];
targetspeed = 40;
smoothTrajectory(targetcar,targetpath,targetspeed);
自車の後ろからのシナリオの 3-D ビューの追跡プロットを表示します。
chasePlot(egovehicle)

車線とオブジェクトを検出する Vision Detection Generator を作成します。センサーのピッチは 1 度下を指します。
visionSensor = visionDetectionGenerator('Pitch',1.0); visionSensor.DetectorOutput = 'Lanes and objects'; visionSensor.ActorProfiles = actorProfiles(scenario);
シミュレーションを実行します。
鳥瞰図プロットおよび関連プロッターを作成します。
センサー カバレッジ領域を表示します。
車線区分線を表示します。
道路上のターゲットのグラウンド トゥルース姿勢を取得します。
60 m 前までの最適な車線境界線の点を取得します。
最適なターゲット姿勢および車線境界線から検出を生成します。
ターゲットのアウトラインを表示します。
オブジェクト検出が有効な場合はオブジェクト検出を表示します。
車線検出が有効な場合は車線境界線を表示します。
bep = birdsEyePlot('XLim',[0 60],'YLim',[-35 35]); caPlotter = coverageAreaPlotter(bep,'DisplayName','Coverage area', ... 'FaceColor','blue'); detPlotter = detectionPlotter(bep,'DisplayName','Object detections'); lmPlotter = laneMarkingPlotter(bep,'DisplayName','Lane markings'); lbPlotter = laneBoundaryPlotter(bep,'DisplayName', ... 'Lane boundary detections','Color','red'); olPlotter = outlinePlotter(bep); plotCoverageArea(caPlotter,visionSensor.SensorLocation,... visionSensor.MaxRange,visionSensor.Yaw, ... visionSensor.FieldOfView(1)); while advance(scenario) [lmv,lmf] = laneMarkingVertices(egovehicle); plotLaneMarking(lmPlotter,lmv,lmf) tgtpose = targetPoses(egovehicle); lookaheadDistance = 0:0.5:60; lb = laneBoundaries(egovehicle,'XDistance',lookaheadDistance,'LocationType','inner'); [obdets,nobdets,obValid,lb_dets,nlb_dets,lbValid] = ... visionSensor(tgtpose,lb,scenario.SimulationTime); [objposition,objyaw,objlength,objwidth,objoriginOffset,color] = targetOutlines(egovehicle); plotOutline(olPlotter,objposition,objyaw,objlength,objwidth, ... 'OriginOffset',objoriginOffset,'Color',color) if obValid detPos = cellfun(@(d)d.Measurement(1:2),obdets,'UniformOutput',false); detPos = vertcat(zeros(0,2),cell2mat(detPos')'); plotDetection(detPlotter,detPos) end if lbValid plotLaneBoundary(lbPlotter,vertcat(lb_dets.LaneBoundaries)) end end


この例では、関数 addSensors を使用してドライビング シナリオにセンサーを追加し、個々のセンサー入力に基づいてグラウンド トゥルース ターゲット姿勢を取得します。次に、グラウンド トゥルース ターゲット姿勢を処理して検出にし、それらを可視化します。
ドライビング シナリオおよび鳥瞰図プロットの設定
自車および 2 台のターゲット車両が含まれるドライビング シナリオを作成します。一方のターゲット車両は自車の前方にあり、もう一方は自車の左側にあります。
[scenario, egovehicle] = helperCreateDrivingScenario;
自車の前方に取り付けるビジョン センサーを構成します。
visionSensor = visionDetectionGenerator(SensorIndex=1,SensorLocation=[4.0 0],Height=1.1,Pitch=1.0,DetectorOutput="Objects only");自車の左側に取り付ける超音波センサーを構成します。
leftUltrasonic = ultrasonicDetectionGenerator(SensorIndex=2,MountingLocation=[0.5 1 0.2],MountingAngles=[90 0 0],FieldOfView=[70 35],UpdateRate=100);
ドライビング シナリオを可視化する鳥瞰図プロットを作成します。
figHandle=figure(Name="BEP",Visible="on"); [detPlotter,lmPlotter,olPlotter,lulrdPlotter,luldetPlotter] = helperCreateBEP(visionSensor,leftUltrasonic,figHandle);

センサーの追加とドライビング シナリオのシミュレート
関数 addSensors を使用して、ビジョン センサーと超音波センサーの両方をドライビング シナリオに追加します。目的の車両のアクター ID を指定することにより、関数 addSensors を使用してドライビング シナリオ内の任意の車両にセンサーを追加できます。この例では、自車のアクター ID を指定します。
addSensors(scenario,{visionSensor,leftUltrasonic},egovehicle.ActorID);ドライビング シナリオをシミュレートします。それぞれのセンサー ID を関数 targetPoses への入力として指定することにより、個々のセンサーに基づいて別々のターゲット姿勢が取得されることに注意してください。この構文では、指定したセンサーの範囲のみでターゲットのグラウンド トゥルース姿勢が返されます。その後、グラウンド トゥルース姿勢をそれぞれのセンサー モデルに渡して検出を生成し、それらを可視化します。
while advance(scenario) % Plot scenario lane markings and vehicle outlines at current timestep [lmv,lmf] = laneMarkingVertices(egovehicle); plotLaneMarking(lmPlotter,lmv,lmf) [objposition,objyaw,objlength,objwidth,objoriginOffset,color] = targetOutlines(egovehicle); plotOutline(olPlotter,objposition,objyaw,objlength,objwidth, ... OriginOffset=objoriginOffset,Color=color) % Get ground-truth poses of targets in the range of vision and ultrasonic sensors separately tgtposeVision = targetPoses(scenario,visionSensor.SensorIndex); tgtposeUltrasonic = targetPoses(scenario,leftUltrasonic.SensorIndex); % Obtain detections based on targets only in range [obdets,obValid] = visionSensor(tgtposeVision,scenario.SimulationTime); [lobdets,lobValid] = leftUltrasonic(tgtposeUltrasonic,scenario.SimulationTime); helperPlotBEPVision(obdets,obValid,detPlotter) helperPlotBEPUltrasonic(lobdets,lobValid,leftUltrasonic,lulrdPlotter,luldetPlotter) end

補助関数
helperCreateDrivingScenario は、道路および車両のプロパティを指定することにより、ドライビング シナリオを作成します。
function [scenario, egovehicle] = helperCreateDrivingScenario scenario = drivingScenario; roadCenters = [-120 30 0;-60 0 0;0 0 0; 60 0 0; 120 30 0; 180 60 0]; lspc = lanespec(3); road(scenario,roadCenters,Lanes=lspc); % Create an ego vehicle that travels in the center lane at a velocity of 30 m/s. egovehicle = vehicle(scenario,ClassID=1); egopath = [1.5 0 0; 60 0 0; 111 25 0]; egospeed = 30; smoothTrajectory(egovehicle,egopath,egospeed); % Add a target vehicle that travels ahead of the ego vehicle at 30.5 m/s in the right lane, and changes lanes close to the ego vehicle. ftargetcar = vehicle(scenario,ClassID=1); ftargetpath = [8 2; 60 -3.2; 120 33]; ftargetspeed = 40; smoothTrajectory(ftargetcar,ftargetpath,ftargetspeed); % Add a second target vehicle that travels in the left lane at 32m/s. ltargetcar = vehicle(scenario,ClassID=1); ltargetpath = [-5.0 3.5 0; 60 3.5 0; 111 28.5 0]; ltargetspeed = 30; smoothTrajectory(ltargetcar,ltargetpath,ltargetspeed); end
helperCreateBEP は、ドライビング シナリオ シミュレーションを可視化するための鳥瞰図プロットを作成します。
function [detPlotter, lmPlotter, olPlotter, lulrdPlotter,luldetPlotter] = helperCreateBEP(visionSensor,leftUltrasonic,Figure) screenSize = double(get(groot,'ScreenSize')); Figure.Position = [screenSize(3)*0.17 screenSize(4)*0.15 screenSize(3)*0.4 screenSize(4)*0.6]; clf(Figure); bepAxes = axes(Figure); grid(bepAxes,'on'); bep = birdsEyePlot(Parent=bepAxes,XLim=[-20 60],YLim=[-35 35]); caPlotterV = coverageAreaPlotter(bep,DisplayName="Vision Coverage area",FaceColor="b"); caPlotterU = coverageAreaPlotter(bep,DisplayName="Ultrasonic Coverage area",FaceColor="m"); detPlotter = detectionPlotter(bep,DisplayName="Object detections"); lmPlotter = laneMarkingPlotter(bep,DisplayName="Lane markings"); olPlotter = outlinePlotter(bep); plotCoverageArea(caPlotterV,visionSensor.SensorLocation,... visionSensor.MaxRange,visionSensor.Yaw, ... visionSensor.FieldOfView(1)); plotCoverageArea(caPlotterU,leftUltrasonic.MountingLocation(1:2),... leftUltrasonic.DetectionRange(3),leftUltrasonic.MountingAngles(1), ... leftUltrasonic.FieldOfView(1)); lulrdPlotter = rangeDetectionPlotter(bep,DisplayName="Left Ultrasonic Ranges",LineStyle="-"); luldetPlotter = detectionPlotter(bep,DisplayName="Point-On-Target (Left Ultrasonic)",MarkerFaceColor="k"); end
helperPlotBEPVision は、鳥瞰図プロット上にビジョン検出をプロットします。
function helperPlotBEPVision(obdets,obValid,detPlotter) if obValid detPos = cellfun(@(d)d.Measurement(1:2),obdets,UniformOutput=false); detPos = vertcat(zeros(0,2),cell2mat(detPos')'); plotDetection(detPlotter,detPos) end end
helperPlotBEPUltrasonic は、超音波領域の測定値と点をターゲット上にプロットします。
function helperPlotBEPUltrasonic(lobdets,lobValid,leftUltrasonic,lulrdPlotter,luldetPlotter) if ~isempty(lobdets) && lobValid lranges = lobdets{1}.Measurement; plotRangeDetection(lulrdPlotter,lranges,leftUltrasonic.FieldOfView(1),leftUltrasonic.MountingLocation,leftUltrasonic.MountingAngles) plotDetection(luldetPlotter,lobdets{1}.ObjectAttributes{1}.PointOnTarget(1:2)') end end