computeBoundaryModel
クロソイド車線境界線モデルから車線境界線の点を計算
説明
例
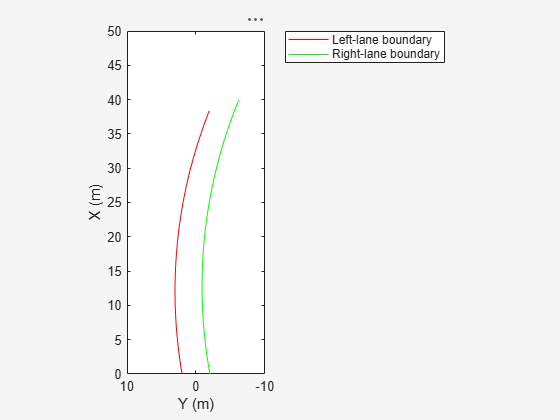
左右の車線境界線を表すクロソイド曲線を作成します。次に、曲線をプロットします。
左の境界線を作成します。
lb = clothoidLaneBoundary('BoundaryType','Solid', ... 'Strength',1,'Width',0.2,'CurveLength',40, ... 'Curvature',-0.8,'LateralOffset',2,'HeadingAngle',10);
ほぼ同じプロパティを使用して、右の境界線を作成します。
rb = lb; rb.LateralOffset = -2;
鳥瞰図プロットを作成します。次に、車線境界線プロッターを作成して、境界線をプロットします。
bep = birdsEyePlot('XLimits',[0 50],'YLimits',[-10 10]); lbPlotter = laneBoundaryPlotter(bep,'DisplayName','Left-lane boundary','Color','r'); rbPlotter = laneBoundaryPlotter(bep,'DisplayName','Right-lane boundary','Color','g'); plotLaneBoundary(lbPlotter,lb) plotLaneBoundary(rbPlotter,rb);
grid
hold on
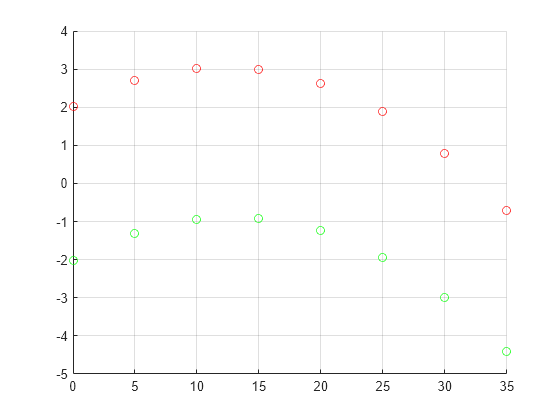
境界線に沿って選択した点の座標をプロットします。
x = 0:5:50; yl = computeBoundaryModel(lb,x); yr = computeBoundaryModel(rb,x); plot(x,yl,'ro') plot(x,yr,'go') hold off
入力引数
出力引数
バージョン履歴
R2018a で導入