clothoidLaneBoundary
クロソイド形状の車線境界線モデル
説明
clothoidLaneBoundary オブジェクトには、クロソイド形状の車線境界線モデルに関する情報が含まれています。"クロソイド" とは、曲率の変化率が距離に対して直線的に変化する曲線のタイプです。
作成
説明
bdry = clothoidLaneBoundarybdry を作成します。
bdry = clothoidLaneBoundary(Name,Value)clothoidLaneBoundary('BoundaryType','Solid') は、実線の車線境界線をもつクロソイド車線境界線モデルを作成します。プロパティ名はそれぞれ引用符で囲みます。
プロパティ
車線境界線の曲率。実数スカラーとして指定します。このプロパティは、距離に対する車線境界線の方向の変化率を表します。単位は度/m です。
例: -1.0
データ型: single | double
車線境界線の曲率の微分。実数スカラーとして指定します。このプロパティは、距離に対する車線の曲率の変化率を表します。単位は度/m^2 です。
例: -0.01
データ型: single | double
道路方向の車線境界線の長さ。非負の実数スカラーとして指定します。単位はメートルです。
例: 25
データ型: single | double
車線境界線の初期進路。実数スカラーとして指定します。車線境界線の進路角は、自車の進路を基準にしています。単位は度です。
例: 10
データ型: single | double
自車位置の車線境界線からの横方向のオフセット。実数スカラーとして指定します。自車の左側にある車線境界線からのオフセットが正になります。自車の右側のオフセットは負になります。単位はメートルです。次のイメージで、自車のオフセットは左車線から 1.5 メートル、右車線から 2.1 メートルです。
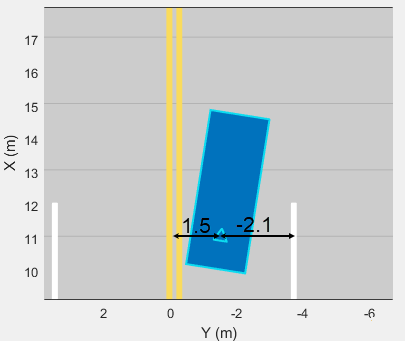
例: -1.2
データ型: single | double
車線境界区分線のタイプ。以下のいずれかの値として指定します。
'Unmarked' | 'Solid' | 'Dashed' | 'DoubleSolid' | 'DoubleDashed' | 'SolidDashed' | 'DashedSolid' |
|---|---|---|---|---|---|---|
車線区分線なし | 実線 | 破線 | 2 本の実線 | 2 本の破線 | 左に実線、右に破線 | 左に破線、右に実線 |
|
|
|
|
|
|
|
|


車線区分線の可視性。範囲 [0, 1] の実数スカラーとして指定します。値 0 は、不可視の区分線に対応します。値 1 は、完全に可視である区分線に対応します。車線区分線が 2 本の場合、同じ度合いが両方の線に使用されます。
例: 0.9
データ型: single | double
車線境界区分線の X 軸方向の範囲。[Xmin Xmax] 形式の実数値ベクトルとして指定します。単位はメートルです。X 軸は自車に垂直であり、前方が正になります。
例: [0 100]
データ型: single | double
車線境界区分線の幅。非負の実数スカラーとして指定します。車線区分線が 2 本の場合、この値はそれぞれの車線区分線の幅と、それらの区分線間の距離に適用されます。単位はメートルです。
例: 0.15
データ型: single | double
オブジェクト関数
computeBoundaryModel | クロソイド車線境界線モデルから車線境界線の点を計算 |
例
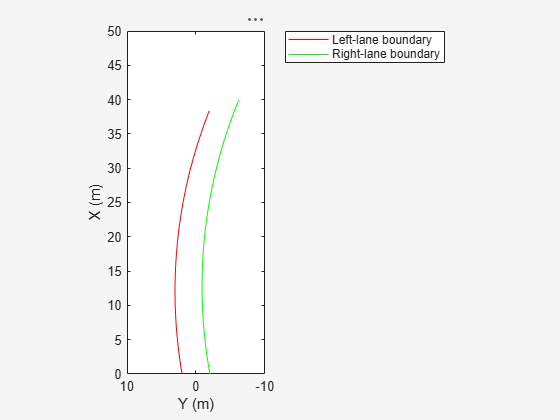
左右の車線境界線を表すクロソイド曲線を作成します。次に、曲線をプロットします。
左の境界線を作成します。
lb = clothoidLaneBoundary('BoundaryType','Solid', ... 'Strength',1,'Width',0.2,'CurveLength',40, ... 'Curvature',-0.8,'LateralOffset',2,'HeadingAngle',10);
ほぼ同じプロパティを使用して、右の境界線を作成します。
rb = lb; rb.LateralOffset = -2;
鳥瞰図プロットを作成します。次に、車線境界線プロッターを作成して、境界線をプロットします。
bep = birdsEyePlot('XLimits',[0 50],'YLimits',[-10 10]); lbPlotter = laneBoundaryPlotter(bep,'DisplayName','Left-lane boundary','Color','r'); rbPlotter = laneBoundaryPlotter(bep,'DisplayName','Right-lane boundary','Color','g'); plotLaneBoundary(lbPlotter,lb) plotLaneBoundary(rbPlotter,rb);
grid
hold on
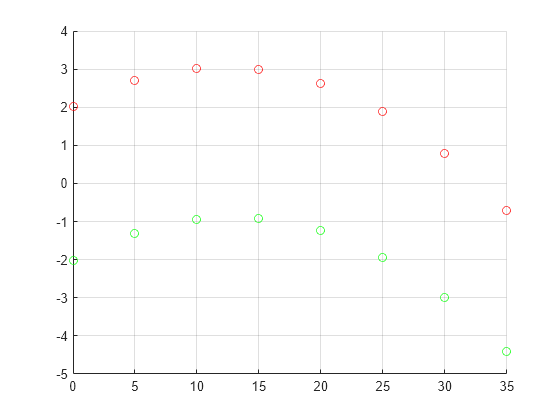
境界線に沿って選択した点の座標をプロットします。
x = 0:5:50; yl = computeBoundaryModel(lb,x); yr = computeBoundaryModel(rb,x); plot(x,yl,'ro') plot(x,yr,'go') hold off
バージョン履歴
R2018a で導入