actorPoses
ドライビング シナリオにおけるアクターの位置、速度、および向き
説明
例
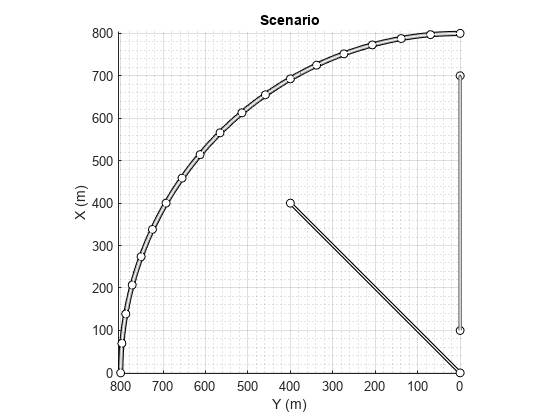
1 つの曲線道路、2 つの直線道路、2 つのアクター (車と自転車) が含まれたドライビング シナリオを作成します。どちらのアクターも 60 秒間道路に沿って移動します。
ドライビング シナリオ オブジェクトを作成します。
scenario = drivingScenario('SampleTime',0.1','StopTime',60);
半径 800 メートルの円弧に従う道路中心点を使用して、曲線道路を作成します。円弧は 0 度から開始して 90 度で終了し、5 度のインクリメントでサンプリングされます。
angs = [0:5:90]'; R = 800; roadcenters = R*[cosd(angs) sind(angs) zeros(size(angs))]; roadwidth = 10; cr = road(scenario,roadcenters,roadwidth);
両端の道路中央点を使用して、既定の幅をもつ 2 本の直線道路を追加します。最初の直線道路の両エッジに障壁を追加します。
roadcenters = [700 0 0; 100 0 0]; sr1 = road(scenario,roadcenters); barrier(scenario,sr1) barrier(scenario,sr1,'RoadEdge','left') roadcenters = [400 400 0; 0 0 0]; road(scenario,roadcenters);
道路の境界を取得します。
rbdry = roadBoundaries(scenario);
車と自転車をシナリオに追加します。1 つ目の直線道路の最初の位置に車を配置します。
car = vehicle(scenario,'ClassID',1,'Position',[700 0 0], ... 'Length',3,'Width',2,'Height',1.6);
道路を進んだ先に自転車を配置します。
bicycle = actor(scenario,'ClassID',3,'Position',[706 376 0]', ... 'Length',2,'Width',0.45,'Height',1.5);
シナリオをプロットします。
plot(scenario,'Centerline','on','RoadCenters','on'); title('Scenario');
アクターの姿勢とプロファイルを表示します。
allActorPoses = actorPoses(scenario)
allActorPoses=242×1 struct array with fields:
ActorID
Position
Velocity
Roll
Pitch
Yaw
AngularVelocity
allActorProfiles = actorProfiles(scenario)
allActorProfiles=242×1 struct array with fields:
ActorID
ClassID
Length
Width
Height
OriginOffset
MeshVertices
MeshFaces
RCSPattern
RCSAzimuthAngles
RCSElevationAngles
このシナリオには障壁があり、各障壁セグメントがアクターと見なされているため、関数 actorPoses および関数 actorProfiles は、すべての静止アクターと非静止アクターの姿勢を返します。車両や二輪車など非静止アクターの姿勢とプロファイルのみを取得するには、まず scenario.Actors.ActorID プロパティを使用して、それらの対応するアクター ID を取得します。
movableActorIDs = [scenario.Actors.ActorID];
次に、それらの ID を使用して、非静止アクターの姿勢とプロファイルのみをフィルター処理します。
movableActorPoseIndices = ismember([allActorPoses.ActorID],movableActorIDs); movableActorPoses = allActorPoses(movableActorPoseIndices)
movableActorPoses=2×1 struct array with fields:
ActorID
Position
Velocity
Roll
Pitch
Yaw
AngularVelocity
movableActorProfiles = allActorProfiles(movableActorPoseIndices)
movableActorProfiles=2×1 struct array with fields:
ActorID
ClassID
Length
Width
Height
OriginOffset
MeshVertices
MeshFaces
RCSPattern
RCSAzimuthAngles
RCSElevationAngles
入力引数
出力引数
バージョン履歴
R2017a で導入