barrier
Add a barrier to a driving scenario
Syntax
Description
barrier(
adds a barrier along a piecewise, clothoid curve that smoothly connects the specified
barrier centers. This approach is useful when adding barriers to edges of roads that
intersect or overlap.scenario,barrierCenters)
barrier(
specifies the angle by which the barrier tilts when traversing the barrier centers.scenario,barrierCenters,bankAngle)
barrier(___,
sets barrier properties using one or more name-value pair arguments, in addition to any
combination of input arguments from previous syntaxes.Name,Value)
Barriers are composed of individual elements called barrier
segments. Use name-value pair arguments such as 'SegmentLength',
'SegmentGap', 'Width' and
'Height' to tune the properties of individual barrier segments.
Jersey barriers and guardrails are the two types of barriers that you can add to a scenario.
Specify the appropriate 'Mesh' and 'ClassID'
arguments to represent the barrier as a guardrail or a jersey barrier.
Examples
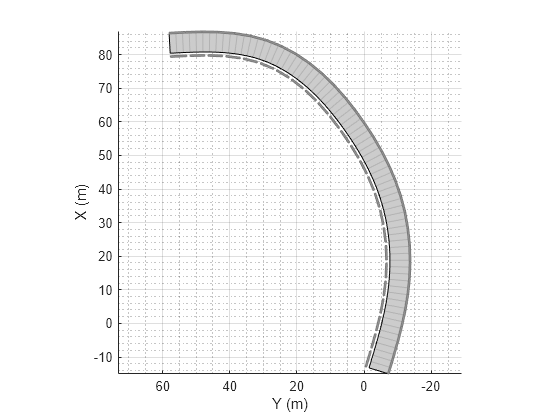
Create a driving scenario and add a curved road.
scenario = drivingScenario; roadCenters = [-14.1 -4.3; 9 -10; 37 -8; 60 3.9; 81.2 29.4; 83.4 57.9]; road1 = road(scenario,roadCenters);
Add a barrier along the right edge of the road.
barrier(scenario,road1)
Add another barrier along the left edge of the road with a lateral offset of 1 m from the edge. Specify a gap of 1 m between individual barrier segments.
barrier(scenario,road1,'RoadEdge',"left",'SegmentGap',1,'RoadEdgeOffset',1)
Plot the scenario.
plot(scenario)
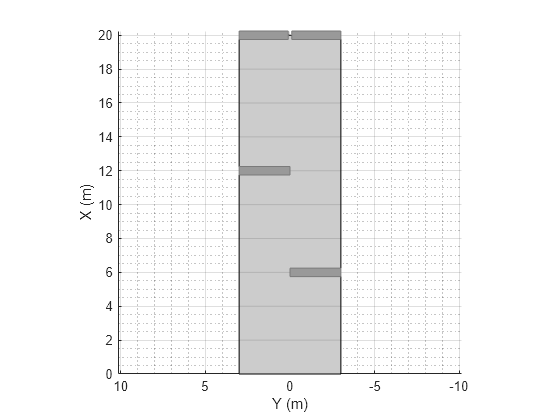
Create a driving scenario and add a straight road.
scenario2 = drivingScenario; roadCenters = [0 0; 20 0]; rr = road(scenario2,roadCenters);
Specify appropriate barrier centers and add a barrier on the road, covering the entire width of the road.
barrierCenters = [20 3; 20 0; 20 -3];
barrier(scenario2,barrierCenters,'SegmentGap',0.2)Add two barriers on the road, each covering half the width of the road.
barrierCenters1 = [12 3; 12 0]; barrierCenters2 = [6 -3; 6 0]; barrier(scenario2,barrierCenters1,'SegmentGap',0.2) barrier(scenario2,barrierCenters2,'SegmentGap',0.2)
Plot the scenario.
plot(scenario2)
Input Arguments
Name-Value Arguments
Specify optional pairs of arguments as
Name1=Value1,...,NameN=ValueN, where Name is
the argument name and Value is the corresponding value.
Name-value arguments must appear after other arguments, but the order of the
pairs does not matter.
Before R2021a, use commas to separate each name and value, and enclose
Name in quotes.
Example: 'RoadEdge','left' adds a barrier along the left edge of the
road.
Display color of barrier, specified as the comma-separated pair consisting of
'PlotColor' and an RGB triplet, hexadecimal color code, color
name, or short color name.
The barrier appears in the specified color in all programmatic scenario
visualizations, including the plot function, chasePlot function, and plotting functions of birdsEyePlot objects. If you import the scenario into the Driving Scenario
Designer app, then the barrier appears in this color in all app
visualizations. If you import the scenario into Simulink®, then the barrier appears in this color in the Bird's-Eye
Scope.
For a custom color, specify an RGB triplet or a hexadecimal color code.
An RGB triplet is a three-element row vector whose elements specify the intensities of the red, green, and blue components of the color. The intensities must be in the range
[0,1], for example,[0.4 0.6 0.7].A hexadecimal color code is a string scalar or character vector that starts with a hash symbol (
#) followed by three or six hexadecimal digits, which can range from0toF. The values are not case sensitive. Therefore, the color codes"#FF8800","#ff8800","#F80", and"#f80"are equivalent.
Alternatively, you can specify some common colors by name. This table lists the named color options, the equivalent RGB triplets, and the hexadecimal color codes.
| Color Name | Short Name | RGB Triplet | Hexadecimal Color Code | Appearance |
|---|---|---|---|---|
"red" | "r" | [1 0 0] | "#FF0000" |
|
"green" | "g" | [0 1 0] | "#00FF00" |
|
"blue" | "b" | [0 0 1] | "#0000FF" |
|
"cyan"
| "c" | [0 1 1] | "#00FFFF" |
|
"magenta" | "m" | [1 0 1] | "#FF00FF" |
|
"yellow" | "y" | [1 1 0] | "#FFFF00" |
|
"black" | "k" | [0 0 0] | "#000000" |
|
"white" | "w" | [1 1 1] | "#FFFFFF" |
|
This table lists the default color palettes for plots in the light and dark themes.
| Palette | Palette Colors |
|---|---|
Before R2025a: Most plots use these colors by default. |
|
|
|
You can get the RGB triplets and hexadecimal color codes for these palettes using the orderedcolors and rgb2hex functions. For example, get the RGB triplets for the "gem" palette and convert them to hexadecimal color codes.
RGB = orderedcolors("gem");
H = rgb2hex(RGB);Before R2023b: Get the RGB triplets using RGB =
get(groot,"FactoryAxesColorOrder").
Before R2024a: Get the hexadecimal color codes using H =
compose("#%02X%02X%02X",round(RGB*255)).
Limitations
Road networks added using the
roadNetworkfunction do not support barriers.
Tips
For faster simulations, specify the input argument
rangefor thetargetPosesfunction in the scenario advance loop.