updatePlots
ドライビング シナリオのプロットの更新
説明
例
シナリオの車両の位置を変更した後に、ドライビング シナリオのプロットを更新します。
25 メートルの直線道路セグメント上の車両を含むドライビング シナリオを作成します。シナリオをプロットします。
scenario = drivingScenario;
roadcenters = [0 0 0; 25 0 0];
road(scenario,roadcenters);
v = vehicle(scenario,'ClassID',1);
v.Position = [1 0 0];
plot(scenario)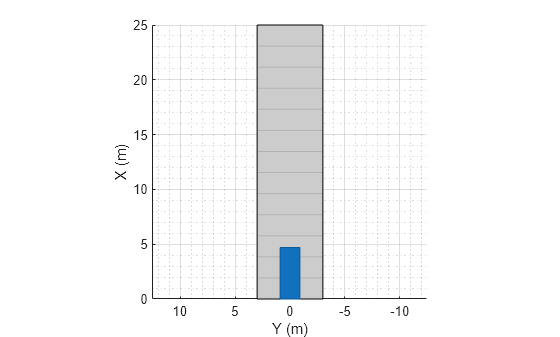
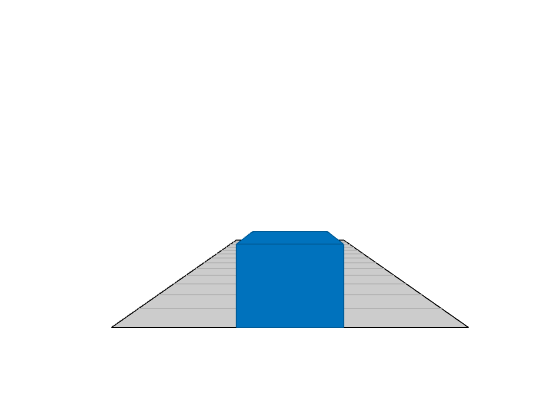
追跡プロットを使用して、車両のパースペクティブからシナリオをプロットします。
chasePlot(v)
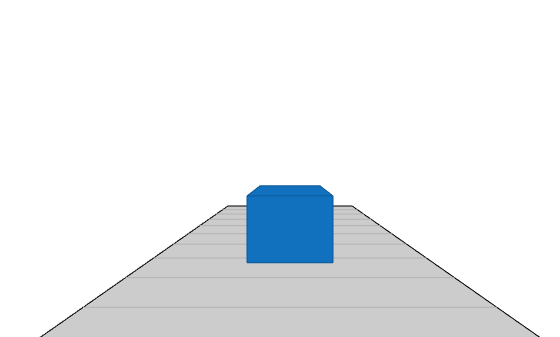
車両の新しい位置を設定します。
v.Position = [12 0 0];
両方のプロットを更新して車両の新しい位置を表示します。
updatePlots(scenario)

入力引数
バージョン履歴
R2017a で導入