ドライビング シナリオ シミュレーション
現実的なドライビング シナリオおよびセンサー モデルを使用したシミュレーションは、自動運転アルゴリズムのテストに欠かせない部分です。Automated Driving Toolbox™ を使用すると、合成センサー データを使用してドライビング シナリオを作成できます。このツールボックスには、自動運転アルゴリズムをテストするために次のシミュレーション環境が用意されています。これらの環境には独自の用途があり、ある環境が別の環境の代わりになることはありません。
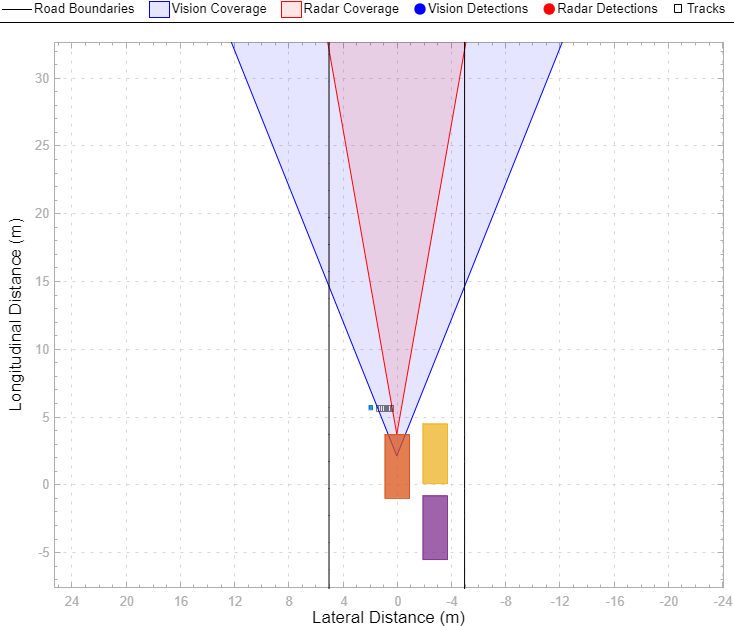
"直方体シミュレーション環境" では、シナリオ内の車両および他のアクターが単純な箱の形状またはポリゴン メッシュ (LiDAR アプリケーションの場合) として表されます。この環境を使用して、迅速にシナリオを作成し、低忠実度のレーダーおよびカメラ センサーを使用して検出を生成し、MATLAB® と Simulink® の両方でコントローラー、追跡アルゴリズム、センサー フュージョン アルゴリズムをテストします。シナリオの作成を開始するには、ドライビング シナリオ デザイナー アプリを使用します。
ASAM OpenDRIVE® ファイル形式の道路ネットワークをインポートし、インポートした道路ネットワークを編集して、シナリオを作成することもできます。次に、ドライビング シナリオを ASAM OpenDRIVE 形式および ASAM OpenSCENARIO® 形式にエクスポートできます。
"Unreal Engine シミュレーション環境" では、シナリオは Epic Games® の Unreal Engine を使用してレンダリングされます。この環境を使用して、より現実的なグラフィックスを使用したシナリオの可視化、高忠実度のレーダー、カメラ、LiDAR センサー データの生成、知覚インザループ システムのテストを行います。この環境は Simulink で使用可能であり、Windows® でのみ実行できます。詳細については、自動運転用の Unreal Engine シミュレーションを参照してください。
Automated Driving Toolbox には、シーンとシナリオをプログラムで管理したり、MATLAB および Simulink でモデル化したアクターを使用して "RoadRunner シナリオ シミュレーション環境" でシナリオをシミュレーションしたりするためのツールが用意されています。詳細については、RoadRunner Scenario シミュレーションを参照してください。
Automated Driving Toolbox は、ADAS シナリオ アプリケーション向けに次の追加サポート パッケージも提供します。
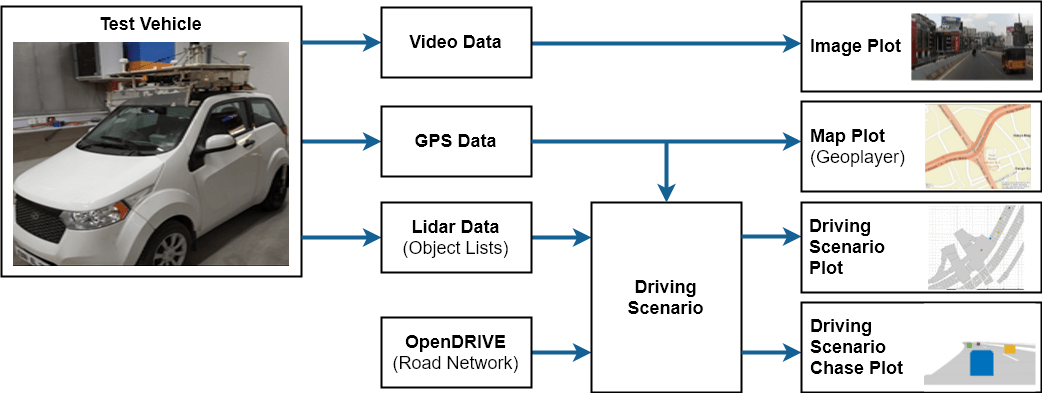
Scenario Builder for Automated Driving Toolbox — カメラ、LiDAR、および処理済みのトラックリスト データなどのセンサーによって記録された実環境のデータを使用して、シーンとシナリオを生成します。詳細については、実環境のセンサー データに基づくシナリオを参照してください。
Automated Driving Toolbox Test Suite for Euro NCAP® Protocols — Euro NCAP などの自動運転規格に対するテスト仕様、シード シナリオ、およびシナリオ バリアントを生成し、テスト メトリクスを評価します。詳細については、Euro NCAP テスト スイートを参照してください。
Automated Driving Toolbox Interface for Eclipse™ SUMO™ Traffic Simulator — Simulink と Eclipse™ SUMO™ 交通シミュレーターの間のコシミュレーションの構成、アクターの生成、および SUMO シナリオにおける情報の読み取りおよび書き込みを行います。詳細については、SUMO Traffic Simulation with RoadRunner Scenarioを参照してください。
主要なトピック
- Create Driving Scenario Interactively and Generate Synthetic Sensor Data
- Simulate Simple Driving Scenario and Sensor in Unreal Engine Environment
- Import ASAM OpenDRIVE Roads into Driving Scenario
- Export Driving Scenario to ASAM OpenSCENARIO XML File
- 自動運転のための Unreal Engine シーンのカスタマイズ
- Read and Write Vehicle Data in SUMO Scenario Using Cosimulation with Simulink
カテゴリ
- 直方体シナリオ シミュレーション
直方体ベースのシナリオと、レーダー、カメラ、および LiDAR センサー モデルからの検出を使用して、自動運転アルゴリズムをテスト
- Unreal Engine シナリオ シミュレーション
Epic Games の Unreal Engine を使用してシミュレーション環境で運転アルゴリズムを開発、テストし、そのパフォーマンスを可視化
- Simulink と Eclipse SUMO 交通シミュレーターのコシミュレーション
Simulink と Eclipse SUMO 交通シミュレーターの間のコシミュレーションの構成、アクターの生成、SUMO シナリオにおける情報の読み取りと書き込み
注目の例

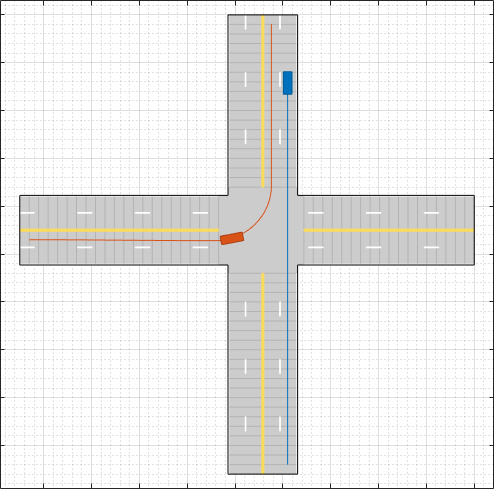
Simulate Vehicle Parking Maneuver in Driving Scenario
Simulate a parking maneuver and generate sensor detections in a large parking lot using a cuboid driving scenario.

Create Actor and Vehicle Trajectories Programmatically
Programmatically create actor and vehicle trajectories for a driving scenario.
プログラムでのドライビング シナリオのバリエーションの作成
ドライビング シナリオ デザイナー アプリを使用して作成されたドライビング シナリオのバリエーションをプログラムで作成する。
Scenario Generation from Recorded Vehicle Data
Automatically generate virtual driving scenarios from recorded vehicle data.
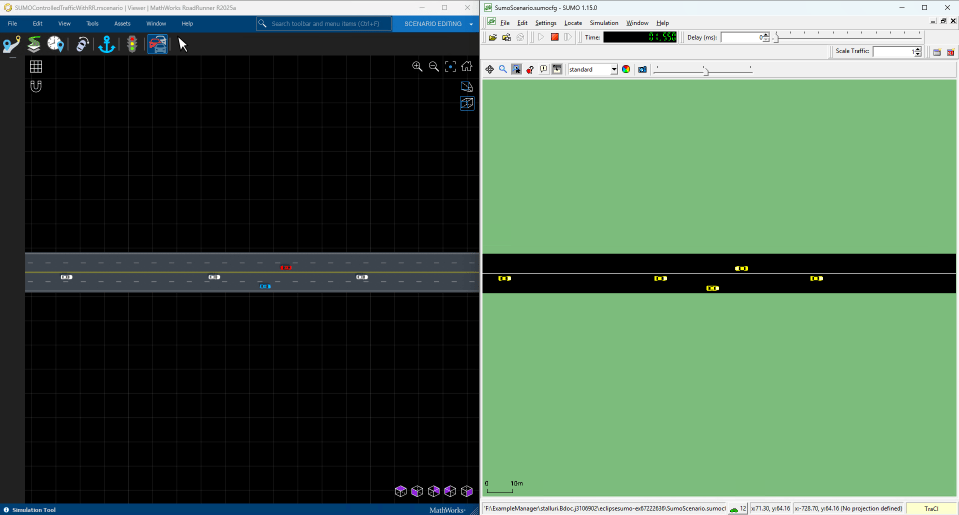
SUMO Traffic Simulation with RoadRunner Scenario
SUMO Traffic Simulation with RoadRunner Scenario.
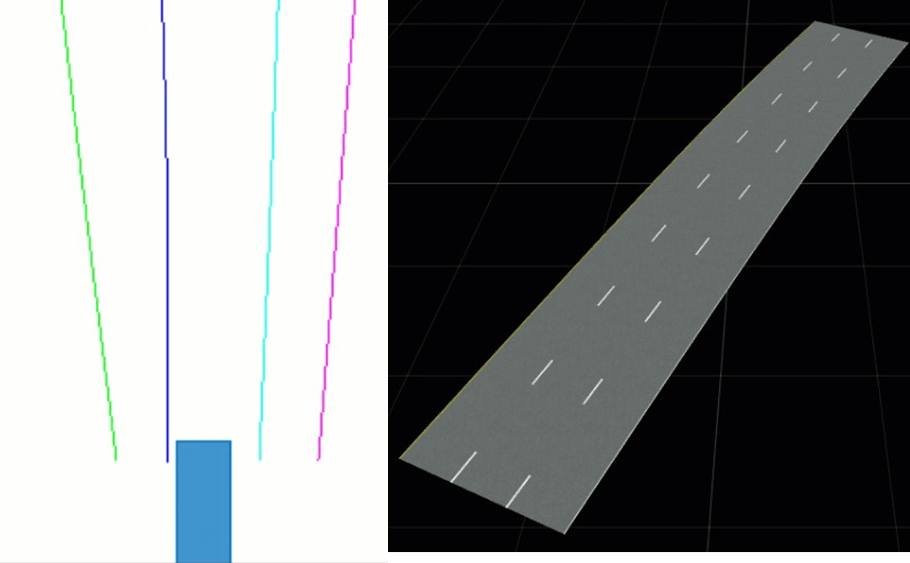
Generate High Definition Scene from Lane Detections and OpenStreetMap
Generate HD road scene using recorded lane detections, GPS data, and OpenStreetMap® data.

Generate Scenario from Actor Track Data and GPS Data
Generate ASAM OpenSCENARIO v1.0 file using recorded actor tracklist and GPS data.

Generate Scenario Variants for Testing AEB Pedestrian Systems
Generate scenario variants to test automated emergency braking (AEB) system using car-to-pedestrian European New Car Assessment Programme (Euro NCAP) test scenario.
ドライビング シナリオを使用した閉ループ ADAS アルゴリズムのテスト
Simulink で、ドライビング シナリオ デザイナー アプリから保存済みのドライビング シナリオを使用して、閉ループ ADAS アルゴリズムをテストする。

Perception-Based Parking Spot Detection Using Unreal Engine Simulation
Build a bird's-eye-view map of a parking lot using semantically segmented images from the ego vehicle camera, and detect empty parking spots from the map.

Design Lidar SLAM Algorithm Using Unreal Engine Simulation Environment
Develop a simultaneous localization and mapping algorithm using synthetic lidar sensor data recorded from the Unreal Engine simulation environment.
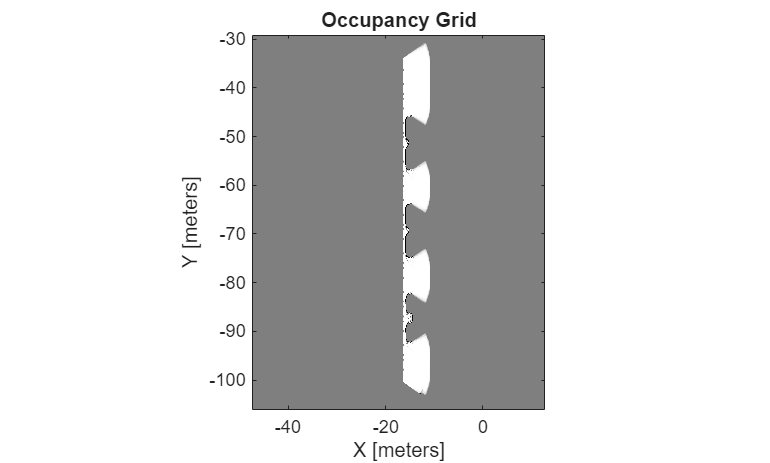
Build Occupancy Map Using Simulation 3D Ultrasonic Sensor
Build an occupancy map of a US city block using a Simulation 3D Ultrasonic Sensor block and Unreal Engine simulation environment.