RoadRunner Scenario シミュレーション
RoadRunner Scenario は、自動運転システムをシミュレーションおよびテストするためのシナリオを設計できる対話的なエディターです。Automated Driving Toolbox™ には、シーンおよびシナリオをプログラムで管理するためのツールが用意されています。ツールボックスには、MATLAB® および Simulink® でモデル化されたアクターを使用して RoadRunner Scenario でシナリオをシミュレーションするためのフレームワークも用意されています。
RoadRunner Scenario シミュレーション ワークフローでは以下を行うことができます。
RoadRunner Scenario シミュレーションは MATLAB コマンドを使用して制御できます。
アクターの姿勢、速度、その他の変数をシミュレーション ログから取得して解析できます。
RoadRunner Scenario シミュレーションで車両アクターにセンサーを統合し、生成されたセンサー データを MATLAB または Simulink で処理できます。
Simulink と MATLAB System object™ の動作を生成できます。
RoadRunner Scenario 内のアクターにこの動作を関連付け、パラメーターを調整し、シナリオをシミュレーションして動作を観察できます。
オプションで、Simulink と MATLAB System object の動作を proto ファイルまたはパッケージとしてパブリッシュできます。
RoadRunner および MATLAB の使用を開始するには、Connect MATLAB and RoadRunner to Control and Analyze Simulations を参照してください。
MATLAB および Simulink でモデル化されたアクターを使用して RoadRunner Scenario をシミュレーションする方法の詳細については、Overview of Simulating RoadRunner Scenarios with MATLAB and Simulinkを参照してください。
主要なトピック
- Get Started with MATLAB Functions for Scenario Authoring
- Simulate a RoadRunner Scenario Using MATLAB Functions
- Overview of Simulating RoadRunner Scenarios with MATLAB and Simulink
- Simulate RoadRunner Scenarios with Observers Modeled in MATLAB or Simulink
- Simulate RoadRunner Scenarios with Actors Modeled in Simulink
- Simulink を使用した RoadRunner シナリオへのセンサーの追加
カテゴリ
- シーン作成用の MATLAB 関数
アクター、論理位相、ウェイポイントなどの RoadRunner シナリオの要素を MATLAB を使用して作成および変更
- シナリオ作成用の MATLAB 関数
MATLAB を使用した、アクター、論理位相、ウェイポイントなどの RoadRunner シナリオ要素の作成および変更
- プログラムでのシーンおよびシナリオの管理
roadrunnerオブジェクトを使用してプログラムでシーンおよびシナリオを開いて、インポートし、管理
- MATLAB と Simulink を使用した RoadRunner Scenario のシミュレーション
MATLAB および Simulink の動作の開発、アクターの動作のパブリッシュ、RoadRunner Scenario シミュレーションでの動作のシミュレーション、シミュレーションの制御、およびシミュレーション パラメーターへのアクセス
注目の例

Add Sensors to RoadRunner Scenario Using MATLAB
Simulate a RoadRunner Scenario with sensor models defined in MATLAB and visualize object and lane detections.

Simulink を使用した RoadRunner シナリオへのセンサーの追加
Simulink で定義されたセンサー モデルをもつ RoadRunner シナリオのシミュレーションを実行し、オブジェクト検出と車線検出を可視化する。

Trajectory Follower with RoadRunner Scenario
Cosimulate RoadRunner Scenario with Simulink to control the speed of trajectory following vehicle in RoadRunner Scenario.
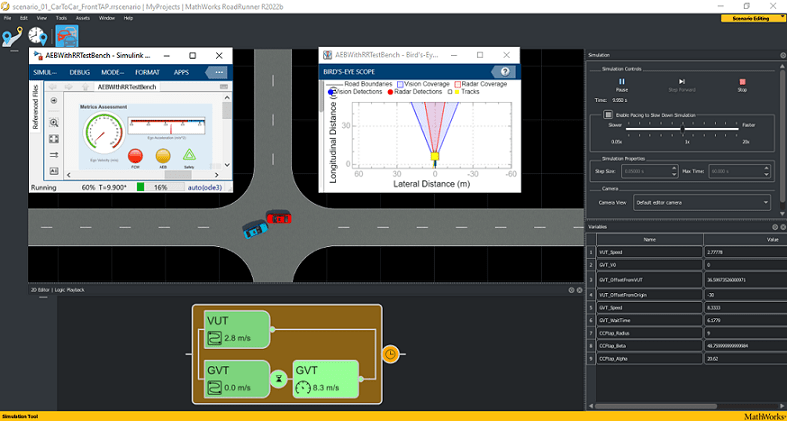
Autonomous Emergency Braking with RoadRunner Scenario
Simulate autonomous emergency braking (AEB) system, designed in Simulink, with RoadRunner Scenario.

Highway Lane Change Planner with RoadRunner Scenario
Simulate a highway lane change planner, designed in Simulink, with RoadRunner Scenario.

Autonomous Emergency Braking with High-Fidelity Vehicle Dynamics
Design autonomous emergency braking system with 14DOF vehicle dynamics in Simulink and cosimulate with RoadRunner Scenario.
Publish Ground Truth and Sensor Data from RoadRunner Scenario to ROS 2 Network
Publish ground-truth and sensor data from a RoadRunner scenario to ROS 2 network and visualize it using ROS Data Analyzer app.

Truck Platooning with RoadRunner Scenario
Simulate truck platooning application, designed in Simulink, with RoadRunner Scenario.

Lane-Keeping System for Self-Driving Trucks
Design a lane-keeping system for self-driving trucks in Simulink and simulate it with RoadRunner Scenario.

Traffic Signal Follower with RoadRunner Scenario
Design a traffic signal follower in Simulink and cosimulate it with RoadRunner Scenario.