Automated Driving Toolbox の座標系
Automated Driving Toolbox™ では次の座標系を使用します。
ワールド:すべての車両およびセンサーが配置される、固定されたユニバーサル座標系。
車両:自車を基準とした座標系。通常、車両座標系は、後車軸の中点の真下にある地面上を原点として配置されます。
センサー:カメラやレーダーなどの特定のセンサーに固有の座標系。
空間:カメラで取得されたイメージに固有の座標系。空間座標内の位置はピクセル単位で表されます。
パターン:チェッカーボード パターン座標系。通常、カメラ センサーのキャリブレーションに使用されます。
これらの座標系は、知覚、制御、ドライビング シナリオ シミュレーションといったさまざまな Automated Driving Toolbox 機能に適用されます。具体的な差異および Epic Games® の Unreal Engine® を使用した 3D シミュレーションの実装の詳細については、Coordinate Systems for Unreal Engine Simulation in Automated Driving Toolboxを参照してください。
ワールド座標系
すべての車両、センサー、および関連座標系は、ワールド座標系に配置されます。ワールド座標系は、グローバル パス プランニング、位置推定、地図作成、ドライビング シナリオ シミュレーションで重要です。Automated Driving Toolbox は、ISO 8855 で定義されている右手直交ワールド座標系を使用します。この座標系では、Z 軸が地面から上方向を指します。単位はメートルです。
車両座標系
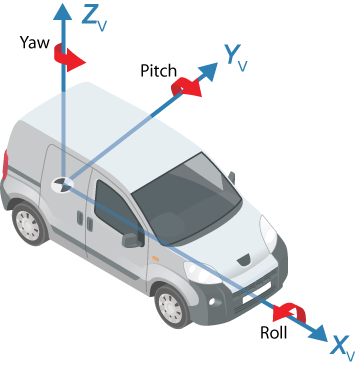
Automated Driving Toolbox で使用される車両座標系 (XV, YV, ZV) は、自車を基準とした座標系です。"自車" とは、車両周辺の環境を知覚するセンサーが取り付けられている車両を指します。
XV 軸は車両の前方向を指します。
YV 軸は、正面を向いた状態の左方向を指します。
ZV 軸は、地面から上方向を指します (右手座標系を使用)。
車両座標系は、回転において ISO 8855 規則に従います。各軸は、その軸の正方向を見たときに、時計回りの方向に正です。
車両座標系の原点は、シミュレーションの環境およびワークフローによって異なり、次のような場所にあります。
| シミュレーションの環境およびワークフロー | 車両座標系の原点 |
|---|---|
| 直方体ドライビング シナリオ シミュレーション | 地面上、後車軸の中点の下。 |
| Unreal Engine を使用する 3D ドライビング シナリオ シミュレーション | 地面上、車両の縦方向と横方向の中心の下。詳細については、Coordinate Systems for Unreal Engine Simulation in Automated Driving Toolboxを参照してください。 |
monoCamera オブジェクトを使用するビジュアル知覚 | 地面上、カメラの中心の真下 (既定)。monoCamera オブジェクトの SensorLocation プロパティを指定することにより、これを別の原点に変更できます。 |
車両座標系における位置は、ワールド単位 (通常はメートル) で表されます。
個別のセンサーから返された値は、統一された基準座標系に配置できるように、車両座標系に変換されます。
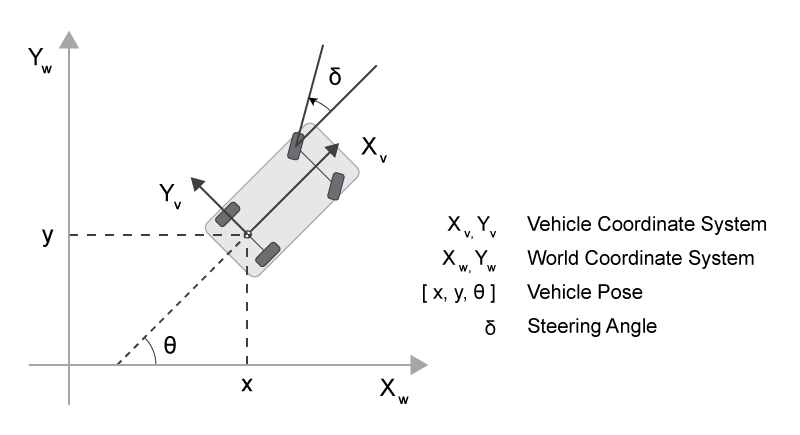
グローバル パス プランニング、位置推定、地図作成、ドライビング シナリオ シミュレーションでは、車両の状態は車両の姿勢を使用して記述できます。車両のステアリング角度は、反時計回りの方向に正です。
センサー座標系
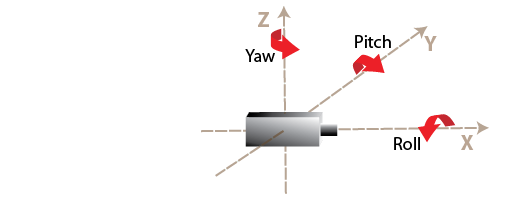
自動運転システムには、車両上および車両内の任意の位置に配置されたセンサーが含まれていることがあります。各センサーの位置には、その座標系の原点が含まれています。カメラは、自動運転システムでよく使用されるセンサーの 1 種です。カメラ座標系で表される点は、カメラの光学中心を原点として記述されます。
センサーのヨー、ピッチ、およびロール角は ISO の規則に従います。これらの角度は、Z 軸、Y 軸、および X 軸の正方向をそれぞれ見たときに時計回りの方向に正になります。これらの角度は、それぞれの座標軸の方向を、車両座標系の対応する座標軸で表します。

空間座標系
空間座標系により、ピクセル座標より細かい粒度でイメージ内の位置を指定できます。ピクセル座標系では、ピクセルが離散単位として扱われ、(3,4) といったように、整数の行と列のペアによって一意的に示されます。空間座標系では、イメージ内の位置は、(3.3,4.7) のような部分ピクセルで表されます。

空間座標系の詳細については、空間座標を参照してください。
パターン座標系
単眼カメラ センサーのパラメーターを推定する際には、一般的な手法として、チェッカーボードなどのキャリブレーション パターンの複数のイメージを使用してカメラをキャリブレーションします。パターン座標系 (XP, YP) では、XP 軸は右を指し、YP 軸は下を指します。チェッカーボードの原点は、チェッカーボードの左上にある正方形の右下隅です。
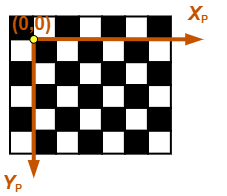
チェッカーボードの隅はそれぞれ、座標系内の別の点を表します。たとえば、原点の右にある隅は (1,0) であり、原点の下にある隅は (0,1) です。チェッカーボード パターンを使用したカメラのキャリブレーションの詳細については、単眼カメラのキャリブレーションを参照してください。