イメージの座標系
いくつかの異なる座標系を使用してイメージ内の位置にアクセスできます。イメージは配列として保存されているため、離散ピクセル インデックスを使用して位置を指定できます。また、イメージは連続空間内にある現実のシーンを表しているため、連続する空間座標を使用して位置を指定することもできます。
ピクセル インデックス
MATLAB のイメージで説明されているように、MATLAB® はほとんどのイメージを配列として保存します。配列の各 (行, 列) インデックスは表示されるイメージの 1 つのピクセルに対応しています。
最初の 2 つの行列次元に対するピクセル インデックスと添字の間は 1 対 1 で対応しています。MATLAB の配列のインデックス付けと同様、ピクセル インデックスは整数値で、範囲は 1 から行また列の長さまでの範囲です。これらのインデックスは、上から下へ、および左から右へ順序付けられています。
たとえば、5 行、2 列目のピクセルのデータは、行列要素 (5, 2) に格納されます。個々のピクセル値にアクセスするには、通常の MATLAB 行列の添字を使用します。たとえば、以下の MATLAB コードを考えてみましょう。
I(2,15)
このコードは、シングル チャネル イメージ I の 2 行 15 列目のピクセルの値を返します。同様に、以下の MATLAB コードを考えてみましょう。
RGB(2,15,:)
このコードは、マルチチャネル イメージ RGB の 2 行 15 列目のピクセルの色の値を返します。
空間座標
"空間座標系" では、イメージ内の位置は連続平面上の位置となります。位置は、ピクセル インデックス系内の行インデックスと列インデックスではなく、x と y の直交座標で表されます。この直交座標の観点では、(3.2, 5.3) などの (x, y) の座標が意味をもつようになり、座標 (5, 3) とは区別されます。
Image Processing Toolbox™ では、基準座標系に応じて 2 種類の空間座標系が定義されています。固有座標はイメージの基準座標系を基準にして位置を指定します。ワールド座標は外部のワールド オブザーバーを基準にして位置を指定します。
固有座標
既定では、ツールボックスは "固有座標系" を使用してイメージの空間座標を定義します。この空間座標系はイメージのピクセル インデックスに対応しています。すべてのピクセルの中心点の固有座標 (x, y) は、そのピクセルに対する列インデックスと行インデックスと同一です。たとえば、5 行 3 列目のピクセルの中心点の空間座標は、x = 3.0 および y = 5.0 です。ただし、固有座標 (3.0, 5.0) の順序は、ピクセル インデックス (5, 3) と逆になることに注意してください。
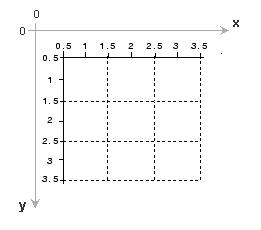
すべてのピクセルの中心の固有座標は整数値です。左上ピクセルの中心の固有座標は (1.0, 1.0) です。右下ピクセルの中心の固有座標は (numCols, numRows) です。ここで、numCols と numRows はそれぞれイメージ内の列と行の数です。一般に、(行, 列) ピクセル インデックス (r, c) をもつピクセルの中心は、固有座標系では空間座標 x = c および y = r になります。
固有座標系の各ピクセルのサイズは 1 つの単位であるため、イメージの境界は非整数の座標となります。イメージの左上隅の位置は (0, 0) ではなく (0.5, 0.5) です。同様に、イメージの右下隅の位置は (numCols + 0.5, numRows + 0.5) です。
いくつかの関数は主にピクセル座標ではなく空間座標で機能しますが、既定の空間座標系 (固有座標) を使用している限り、列 (x) と行 (y) の項で位置を指定できます。
3 次元イメージの場合、z 軸は右手座標系に従ってページを指します。すべてのボクセルの中心点の固有座標 (x, y, z) は、そのボクセルに対する列インデックス、行インデックス、およびページ (または平面) インデックスと同一です。たとえば、行 5、列 3、ページ 2 にあるボクセルの中心点の空間座標は、x = 3.0、y = 5.0、および z = 2.0 です。 2 次元イメージと同様に、3 次元イメージの各ボクセルの中心の固有座標は整数値であり、各ボクセルのサイズの単位は 1 です。3 次元を超える多次元イメージの場合も同様に、z 軸の後の軸は 3 次元目の後の配列インデックスに対応します。
2 次元イメージと同様に、3 次元イメージの各ボクセルの中心の固有座標は整数値であり、各ボクセルのサイズの単位は 1 です。3 次元を超える多次元イメージの場合も同様に、z 軸の後の軸は 3 次元目の後の配列インデックスに対応します。
ワールド座標
"ワールド座標系" (既定ではない空間座標系とも呼ばれる) では、固有座標系のいくつかの制約が緩和されます。ワールド座標系では、ピクセルまたはボクセルは任意の長さ、幅、または深さをもつことができ、任意の座標を中心とすることができます。
次のように、状況によっては、2 次元、3 次元、または多次元のイメージでワールド座標系の使用が必要になる場合もあります。
イメージに対して平行移動などの幾何学的変換を実行し、実行後の位置と元の位置との関係がどうなっているかの情報を保持する場合。
ピクセルまたはボクセルが等方性でない場合。たとえば、磁気共鳴法 (MRI) では、z 方向よりも x 方向および y 方向のサンプル レートが高くなるようにボクセルのデータを収集することができます。
現実世界の位置と一致しているピクセルまたはボクセルの範囲がどの程度かを把握している場合。たとえば、航空写真では、各ピクセルに地上の 5 x 5 メートルの特定の区画が含まれている場合があります。
いずれかの軸の方向を逆にする場合。これは地理空間データを使用するときの一般的な手法です。
ワールド座標系の定義には複数の方法があります。ワールド座標系でのイメージの位置、イメージの解像度、およびイメージの範囲が固有座標やワールド座標とどのように関係しているかを符号化する空間参照オブジェクトを使用して、ワールド座標系を定義することができます。各次元における最大座標と最小座標を空間参照オブジェクトで符号化することもできます。詳細については、イメージのワールド座標系の定義を参照してください。