structure from motion
Structure from motion (SfM) とは、異なる視点から撮影された一連の 2 次元イメージから、シーンの 3 次元構造を推定するプロセスです。Computer Vision Toolbox™ は、特徴検出、マッチング、カメラ姿勢推定、三角測量、バンドル調整などを含む、エンドツーエンドの SfM パイプラインを提供します。これらの機能は、3 次元地図作成、フォトグラメトリ、自律ナビゲーションなどの用途において不可欠です。
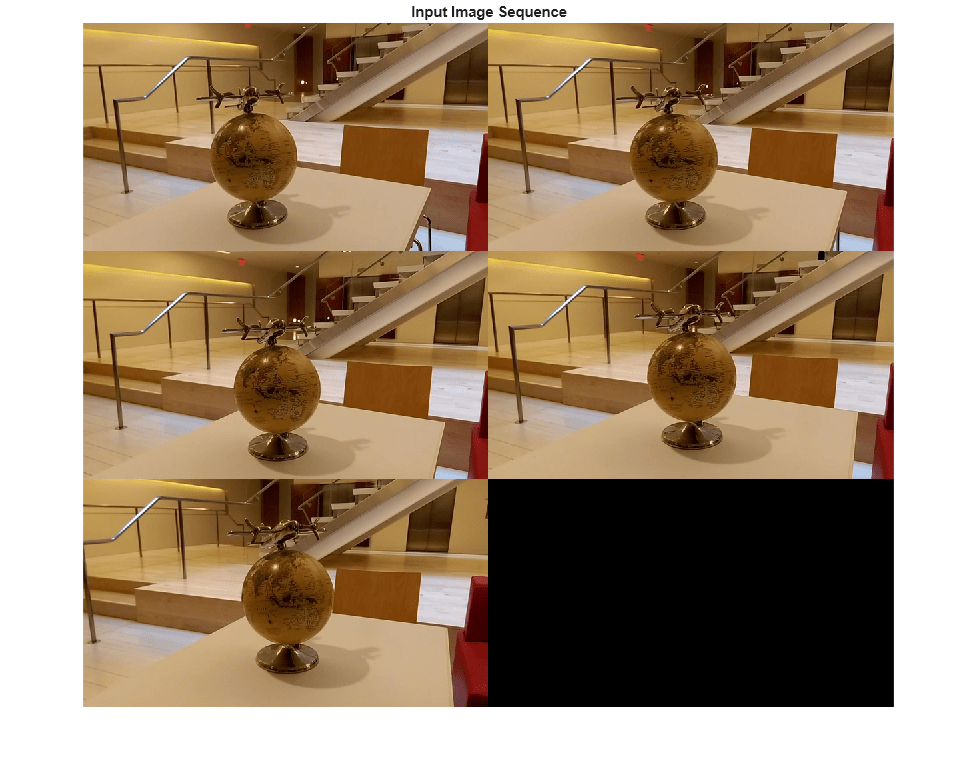
インクリメンタル structure-from-motion パイプラインに関する段階ごとの包括的な解説については、Structure from Motion from Multiple Viewsの一連の例を参照してください。この一連の例では、bag-of-features アプローチを使用してカメラ ビューからビュー グラフを作成する方法、幾何学的制約を使用してビュー グラフを調整する方法、ロバストな初期ビュー ペアを選択して 3 次元再構成を初期化する方法、そして残りのカメラ ビューを統合して完全な 3 次元シーンを再構成する方法を示します。シーンのスパースな 3 次元点群を使用して高密度の 3 次元メッシュを生成する方法については、Dense 3-D Reconstruction of Asteroid Surface from Image Sequenceの例を参照してください。
高密度再構成と新規視点合成のために、ツールボックスはニューラル放射輝度場 (NeRF) をサポートしています。trainNerfacto 関数を使用して、イメージ コレクションで NeRF モデルに学習させ、新規視点を生成します。その後、pc2surfacemesh (Lidar Toolbox) 関数を使用し、その点群を用いて 3 次元メッシュを生成できます。
関数
トピック
インクリメンタル Structure from Motion
- Structure from Motion from Multiple Views
Estimate 3-D structure of a scene from a set of 2-D views using incremental structure from motion. (R2026a 以降)
基礎
- structure from motion とは
2 次元のイメージ シーケンスから 3 次元構造を推定する。 - 座標系
ピクセル インデックス、空間座標、および 3 次元座標系の指定。 - 特徴点のタイプ
いくつかの種類の特徴の点オブジェクトを返したり受け入れたりする関数の選択。 - 局所特徴の検出と抽出
局所特徴の検出と抽出の利点と用途の学習。
注目の例
Structure from Motion from Multiple Views
Estimate 3-D structure of a scene from a set of 2-D views using incremental structure from motion.
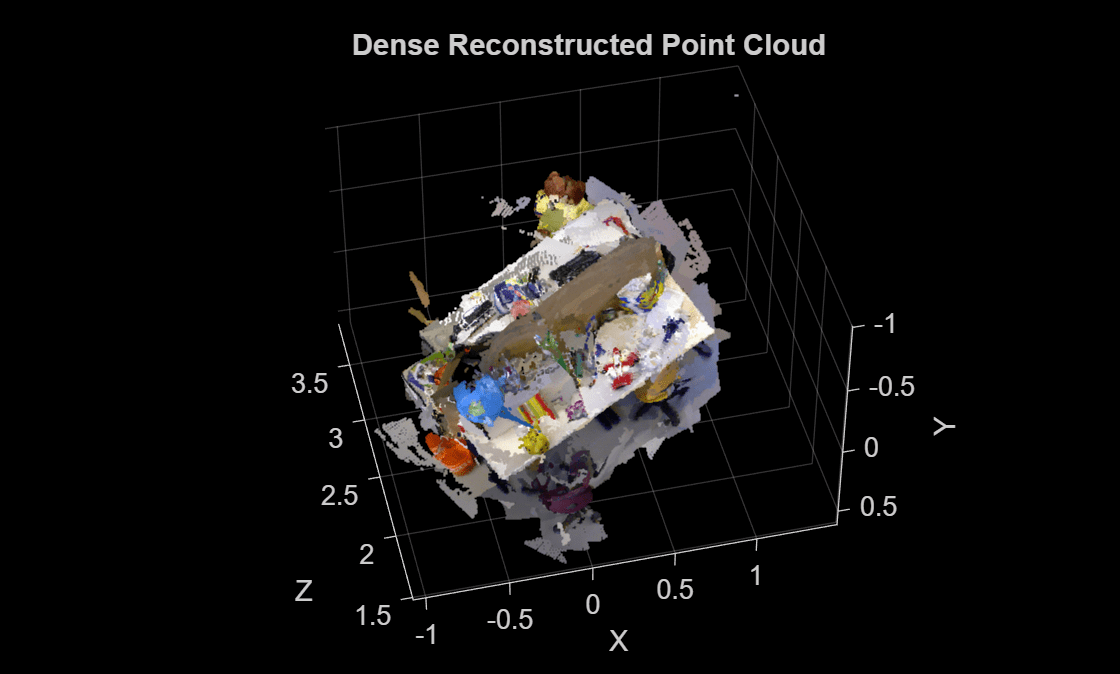
Dense 3-D Reconstruction from Multiple Views Using RAFT Optical Flow
Reconstruct dense 3-D scene by augmenting sparse Structure-from-Motion (SfM) point cloud with dense pixel correspondences estimated using RAFT optical flow.
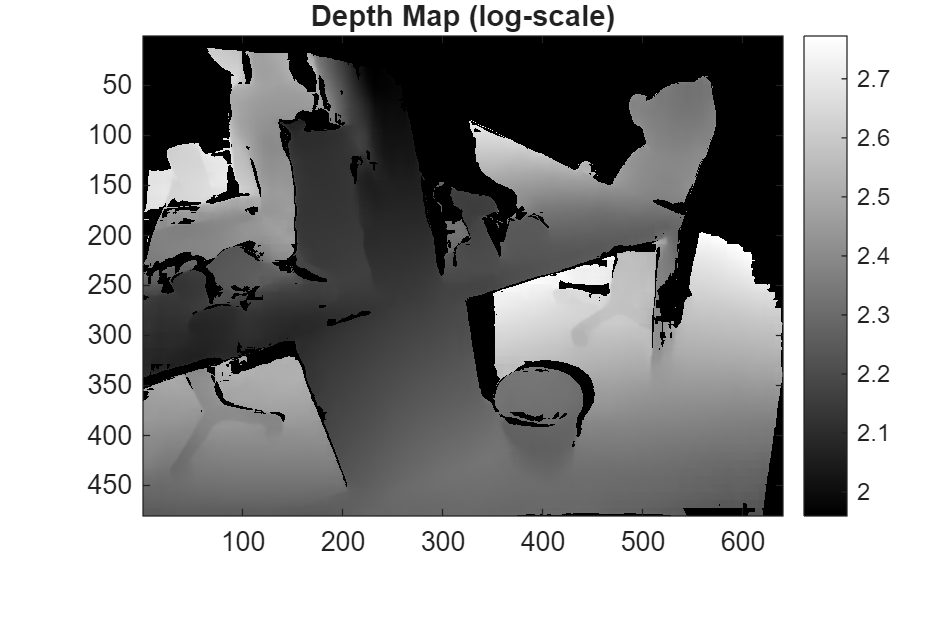
Dense 3-D Reconstruction from Two Views Using RAFT Optical Flow
Perform dense 3-D scene reconstruction from two monocular images showing different viewpoints using RAFT optical flow model.
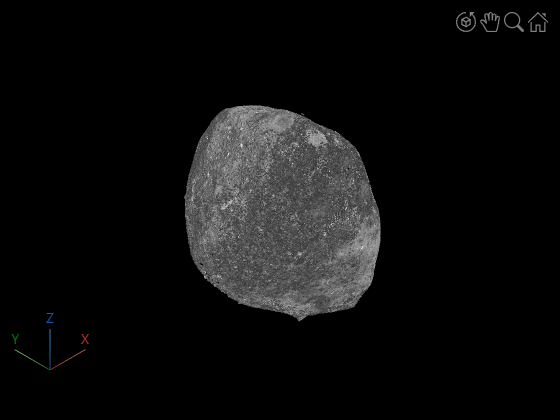
Dense 3-D Reconstruction of Asteroid Surface from Image Sequence
Reconstruct dense 3-D point cloud and continuous surface mesh for an asteroid using 2-D images.
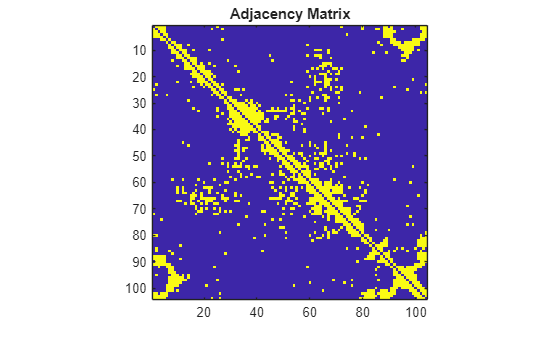
Create View Graph Using Bag of Features
Extract features from images and build a view graph based on visual similarity using bag-of-features approach.
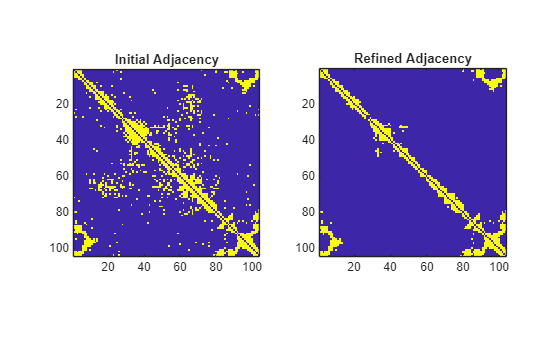
Refine View Graph Using Geometric Verification
Refine the view graph created purely based on visual similarity by verifying geometric consistency between image pairs.
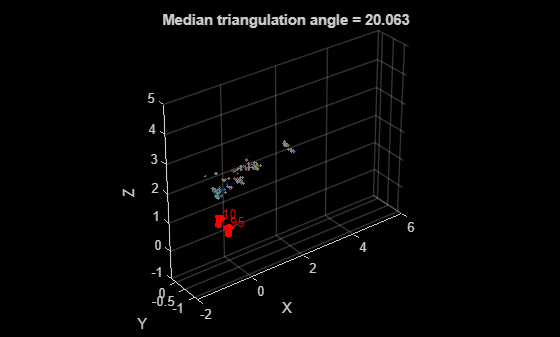
Reconstruct 3-D Scene from Geometrically Refined Pair of Initial Views
Initialize 3-D reconstruction by selecting a robust image pair from the geometrically refined view graph.
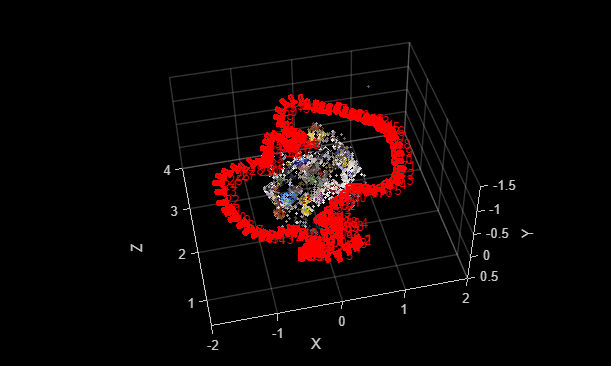
Reconstruct Complete 3-D Scene Using Incremental Structure from Motion
Use incremental structure from motion to generate complete 3-D scene by integrating all camera views with the initialized 3-D reconstruction.

2 つのビューからの structure from motion
一連の 2 次元イメージから 3 次元シーンの構造を推定します。
Reconstruct 3-D Scenes and Synthesize Novel Views Using Neural Radiance Field Model
Reconstruct 3-D scenes and synthesize novel views from a set of 2-D images using the Nerfacto Neural Radiance Field (NeRF) model.