カメラ姿勢推定と 3 次元再構成
Computer Vision Toolbox™ は、カメラの姿勢を推定し、複数の視点から 3 次元シーンを再構成するための包括的な基礎ツール セットを提供します。これらのツールは、structure-from-motion、visual SLAM、拡張現実、ロボティクスなどの用途において不可欠です。基本行列や基礎行列を使用してカメラの姿勢を推定できるほか、エピポーラ幾何に基づいて相対的なカメラ位置を計算することも可能です。キャリブレーション済みのカメラの場合、透視 3 点 (P3P) アルゴリズムまたはカメラ射影行列を使用して、2 次元と 3 次元の点の対応関係から絶対姿勢または相対姿勢を判定することができます。詳細については、estimateEssentialMatrix、estimateFundamentalMatrix、および estrelpose を参照してください。
姿勢推定を調整し、再構成の精度を向上させるため、ツールボックスは、カメラの姿勢と 3 次元点の位置を同時または個別に最適化するためのバンドル調整技術をサポートしています。詳細については、bundleAdjustment を参照してください。
3 次元再構成では、複数の視点から点を三角測量し、点と軌跡の対応関係を管理できます。イメージ座標とワールド座標の相互変換も可能であり、投影や逆投影などのタスクをサポートします。詳細については、pointTrack、triangulate、および img2world2d を参照してください。
ツールボックスは、専用オブジェクトを使用してイメージ データおよび点データを管理・整理する機能を提供します。これらの構造により、大規模な再構成パイプラインのための姿勢グラフの作成と最適化が可能になります。ツールボックスは、3 次元空間におけるカメラの位置や再構成された点群の可視化もサポートしています。詳細については、imageviewset、createPoseGraph、および plotCamera を参照してください。
関数
トピック
- Structure from Motion from Multiple Views
Estimate 3-D structure of a scene from a set of 2-D views using incremental structure from motion. (R2026a 以降)
- MATLAB での Visual SLAM の実装
Visual simultaneous localization and mapping (vSLAM) ワークフローと、MATLAB を使用してそれを実装する方法について理解する。
- 座標系
ピクセル インデックス、空間座標、および 3 次元座標系の指定。
- カメラ キャリブレーションとは
イメージまたはビデオ カメラのレンズとイメージ センサーのパラメーターを推定します。
注目の例

単眼の Visual Simultaneous Localization and Mapping
Visual simultaneous localization and mapping (vSLAM)。

ステレオ Visual Simultaneous Localization and Mapping
ステレオ カメラのイメージ データを処理して、屋外環境マップを作成し、カメラの軌跡を推定します。

Monocular Visual-Inertial SLAM
Perform SLAM by combining images captured by a monocular camera with measurements from an IMU sensor.

RGB-D カメラでの Visual SLAM
RGB-D イメージ データを処理して、屋内環境マップを作成し、カメラの軌跡を推定する。
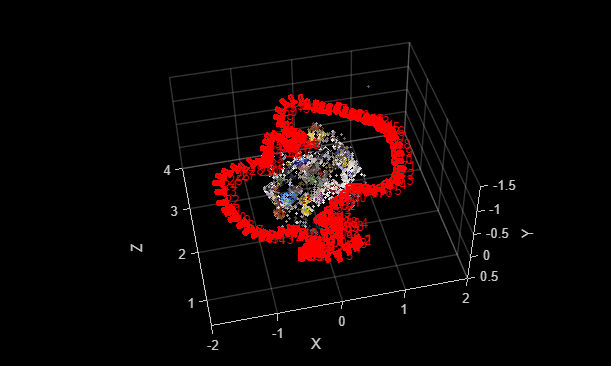
Reconstruct Complete 3-D Scene Using Incremental Structure from Motion
Use incremental structure from motion to generate complete 3-D scene by integrating all camera views with the initialized 3-D reconstruction.
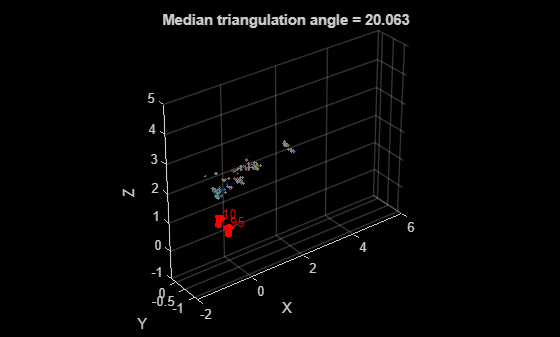
Reconstruct 3-D Scene from Geometrically Refined Pair of Initial Views
Initialize 3-D reconstruction by selecting a robust image pair from the geometrically refined view graph.

2 つのビューからの structure from motion
一連の 2 次元イメージから 3 次元シーンの構造を推定します。

単眼ビジュアル オドメトリ
イメージのシーケンスを解析してカメラの位置と向きを特定する。
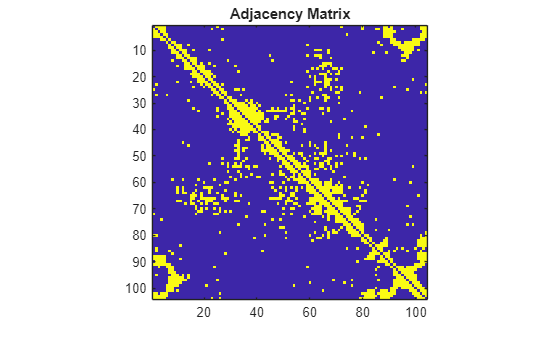
Create View Graph Using Bag of Features
Extract features from images and build a view graph based on visual similarity using bag-of-features approach.
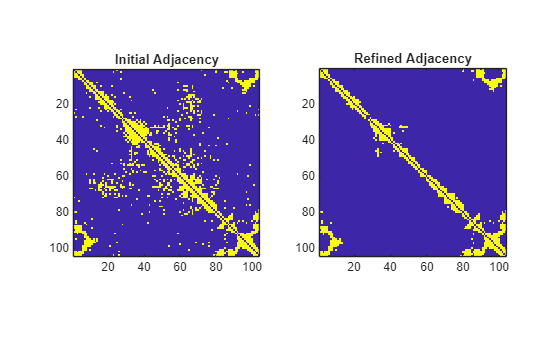
Refine View Graph Using Geometric Verification
Refine the view graph created purely based on visual similarity by verifying geometric consistency between image pairs.