cameraProjection
説明
camProjection = cameraProjection(intrinsics,tform)camProjection を返します。camProjection を使用して、変換 tform に従って同次座標の 3 次元ワールド ポイントをイメージに投影できます。
例
一連のキャリブレーション イメージを作成します。
images = imageDatastore(fullfile(toolboxdir("vision"),"visiondata", ... "calibration","slr"));
イメージ内のチェッカーボードのコーナーを検出します。
[imagePoints,patternDims] = detectCheckerboardPoints(images.Files);
左上隅が (0,0) のパターン中心の座標系でチェッカーボードのコーナーのワールド座標を生成します。正方形のサイズはミリメートル単位です。
squareSize = 29; % millimeters worldPoints = patternWorldPoints("checkerboard",patternDims,squareSize);
カメラのキャリブレーションを行います。
I = readimage(images,1); imageSize = [size(I,1) size(I,2)]; cameraParams = estimateCameraParameters(imagePoints,worldPoints,ImageSize=imageSize); intrinsics = cameraParams.Intrinsics;
新しい位置でイメージを読み込みます。
imOrig = readimage(images,9);
figure
imshow(imOrig)
title("Input Image")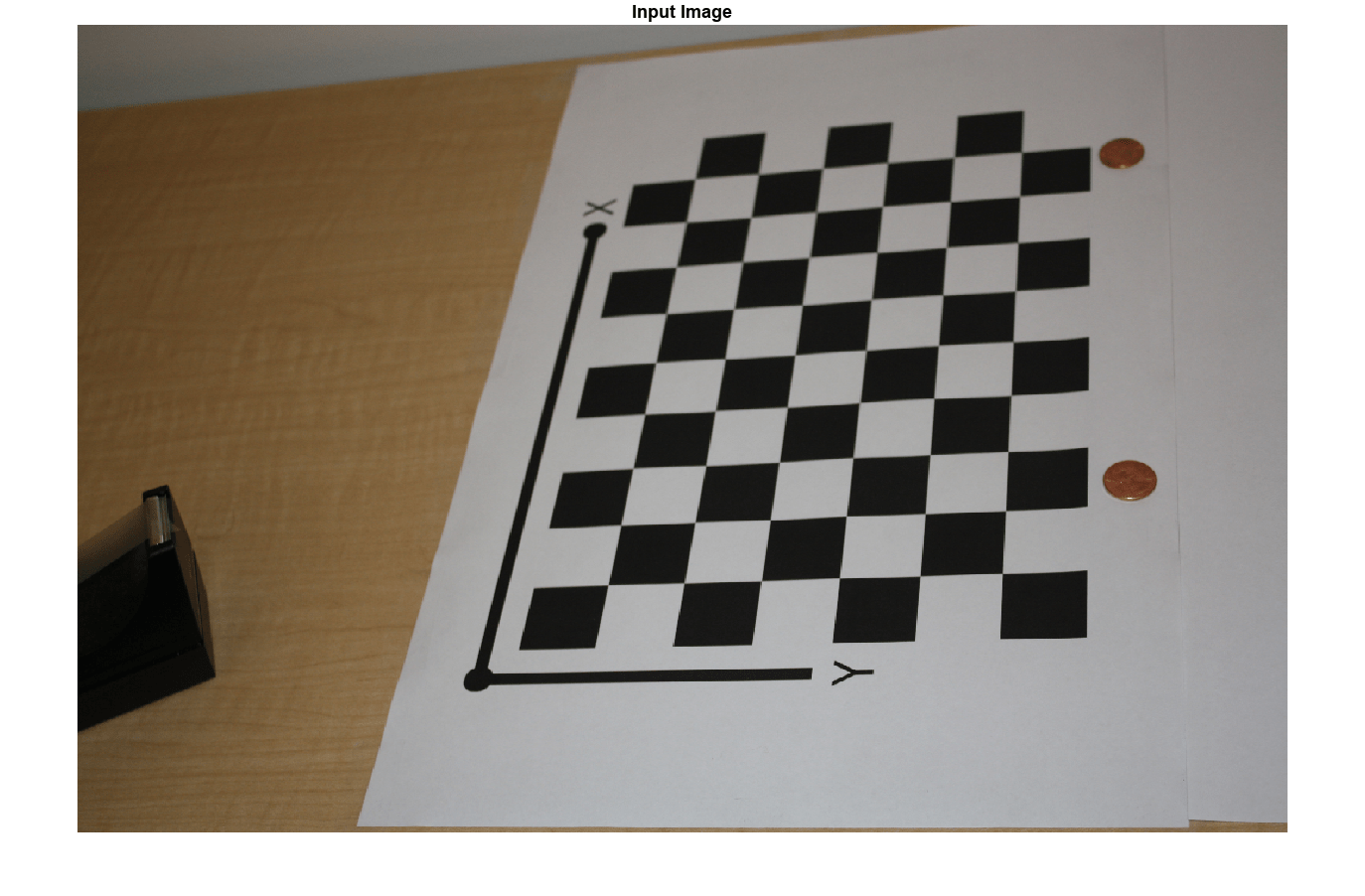
イメージの歪みを補正します。
[im,newIntrinsics] = undistortImage(imOrig,intrinsics,OutputView="full");新しいイメージで参照オブジェクトを検索します。
[imagePoints,patternDims] = detectCheckerboardPoints(im);
イメージ座標系のシフトを補正します。
newOrigin = intrinsics.PrincipalPoint-newIntrinsics.PrincipalPoint; imagePoints = imagePoints+newOrigin;
新しい外部パラメーターを計算します。
camExtrinsics = estimateExtrinsics(imagePoints,worldPoints,intrinsics);
カメラ射影行列を計算します。
P = cameraProjection(intrinsics,camExtrinsics)
P = 3×4
105 ×
0.0157 0.0404 0.0199 8.9399
-0.0271 -0.0046 0.0387 9.4399
0.0000 -0.0000 0.0000 0.0072