モデルベースの PID コントローラー調整
Simulink Control Design™ の PID 調整ツールを使用して、連続または離散の PID Controller または PID Controller (2DOF) Simulink ブロックを含む単一ループ制御システムを調整できます。アプリケーションに適した PID 調整ツールを判定するには、制御設計法の選択を参照してください。
グラフィカル ツール
| PID 調整器 | PID コントローラーの調整 |
ブロック
| PID Controller | 連続時間と離散時間の PID コントローラー |
| PID Controller (2DOF) | 連続時間と離散時間の 2 自由度の PID コントローラー |
| Discrete PID Controller | 離散時間と連続時間の PID コントローラー |
| Discrete PID Controller (2DOF) | 離散時間と連続時間の 2 自由度 PID コントローラー |
トピック
PID 調整の基礎
- 制御設計法の選択
Simulink Control Design には、Transfer Fcn ブロックや PID Controller ブロックなどの Simulink ブロックを調整する方法がいくつか備わっています。 - Simulink でのモデルベースの PID 調整の紹介
PID 調整器を使用して、PID Controller ブロックまたは PID Controller (2DOF) ブロックを含む Simulink モデルで PID ゲインを対話的に調整する。
- 設定値追従と外乱の抑制のいずれかを優先するための PID コントローラーの調整
PID コントローラーを調整して設定値追従のオーバーシュートを小さくしたり、プラント入力における外乱の抑制を改善します。 - モデル参照内の PID コントローラーの調整
1 つ以上の開いたモデルで参照されるモデル内にあるコントローラー ブロックから PID 調整器を開く場合、線形化および調整における最上位モデルを指定します。
代替プラント モデル
- 異なる操作点での調整
既定の設定では、PID 調整器はプラントを線形化して、Simulink モデルの初期条件で指定された操作点でコントローラーを設計します。この操作点が、コントローラーを設計する対象の操作点と異なる場合もあります。 - プラント周波数応答データからの PID コントローラーの設計
プラント モデルが線形化されない場合、1 つのオプションは、シミュレートされた周波数応答データに基づいて PID コントローラーを設計することです。Simulink Control Design には、これを行う方法がいくつか用意されています。
- 測定またはシミュレーションで得られた応答データから対話的にプラントを推定
線形化されないプラントでは、System Identification Toolbox™ ソフトウェアがある場合、PID 調整器を使用して時間領域の応答データに基づき線形プラント モデルのパラメーターを推定できます。その後、結果の推定モデルの PID コントローラーを調整することができます。
ゲイン スケジュール PID 制御
- 複数操作点用の PID コントローラー群の設計
非線形 Simulink モデルが幅広い操作条件にわたり動作する場合、複数のモデル操作点に対する PID コントローラーの配列を設計できます。 - ゲイン スケジュール PID コントローラーの実装
PID コントローラー群を使用してゲイン スケジュール制御を実装するには、各プラント操作点を対応する PID ゲインに関連付けるルックアップ テーブルを作成します。
2 自由度 PID コントローラー
- 2 自由度 PID コントローラーの設計
PID Controller (2DOF) ブロックを調整し、良好な設定点の追従と適切な外乱の抑制の両方を達成します。 - PI-D および I-PD コントローラーの指定
PI-D および I-PD コントローラーは、制御信号の基準信号の変化の影響を緩和するために使用されます。これらのコントローラーは、2DOF PID コントローラーの変形です。
トラブルシューティング
著しい不連続性をもつブロックなど、一部の Simulink ブロックでは良好な線形化の結果が得られないことがあります。たとえば、不連続点から離れた領域でモデルが動作する場合、ブロックの線形化はゼロになります。
PID 調整器を使用しても適切な設計が見つからない場合、別のタイプの PID コントローラーを試してみます。いずれの PID コントローラーでも満足な結果が得られない場合は、さらに複雑なコントローラーの設計を検討します。
PID 調整器で計算された PID ゲインを使用して Simulink モデルを実行すると、シミュレーション出力は PID 調整器の応答プロットと異なる場合があります。
シミュレートされたモデルで受け入れ可能な PID 設計を見つけることができない
PID 調整器で計算された PID ゲインを使用して Simulink モデルを実行すると、シミュレーションの出力が設計要件を満たさない場合があります。
調整された連続時間 PID コントローラーを離散化するとコントローラーの性能が低下する場合、離散時間コントローラーを直接調整することを検討してください。
PID コントローラーの調整時に、D ゲインに I ゲインとは異なる符号がある
PID 調整器を使用してコントローラーを設計する場合、結果の微分ゲインが積分ゲインとは異なる符合をもつことがあります。PID 調整器は、1 つ以上のゲインが負の場合でも常に安定したコントローラーを返します。
注目の例

周波数応答データを使用した昇圧コンバーター モデルのコントローラーの設計
線形化できない Simscape™ Electrical™ モデル用のコントローラーを設計するには、プラントの周波数応答を推定し、その推定データを PID 調整器にインポートすることができます。

車両隊列走行用のコントローラーの設計
PID 調整器を使用して隊列の後続車両の間隔コントローラーを調整する。
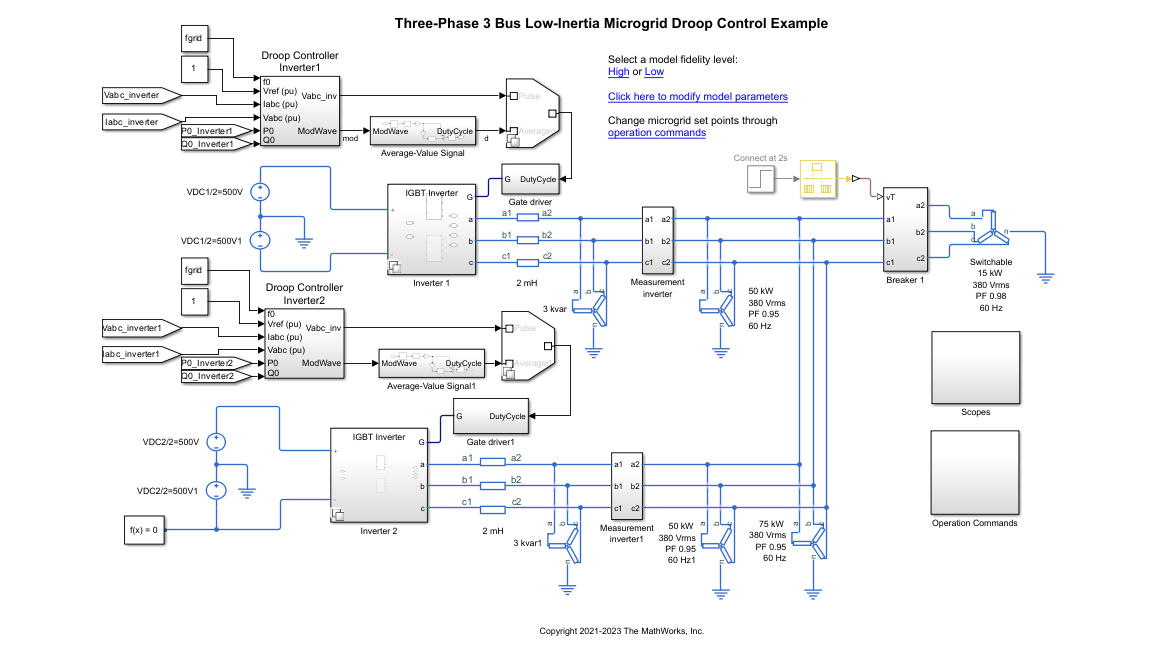
複数の忠実度をもつドループ コントローラーを使用したリモート マイクログリッドの自立運転
リモート マイクログリッドの自立運転にドループ制御手法を実装する。