PID 調整器での設計の解析
PID コントローラーが要件を満たしているかどうかを判断するには、PID 調整器応答プロットを使用してシステム応答を解析できます。
システム応答のプロット
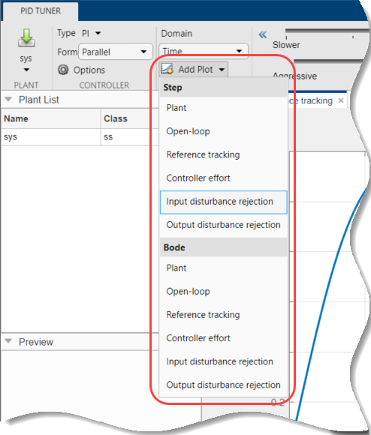
補償器設計が要件を満たしているかどうかを判断するには、応答プロットを使用してシステム応答を解析できます。[PID 調整器] タブで、[プロットの追加] メニューから応答プロットを選択します。[プロットの追加] メニューでは、いくつかのステップ プロット (時間領域応答) やボード線図 (周波数領域応答) から選択することもできます。
PI、PIDF、PDF などの 1-DOF PID コントローラー タイプの場合、ソフトウェアは次の単一ループ制御アーキテクチャに基づいてシステム応答を計算します。ここで、G は指定したプラント、C は PID コントローラーです。

PI2、PIDF2、I-PD などの 2-DOF PID コントローラー タイプの場合、ソフトウェアは次に示すアーキテクチャに基づいて応答を計算します。

システム応答は、2 自由度 PID コントローラーで説明されているように、設定点コンポーネント Cr とフィードバック コンポーネント Cy への 2-DOF PID コントローラー C の分解に基づいています。
次の表は、解析プロットに使用可能な応答をまとめています。
| 応答 | プロットされたシステム (1-DOF) | プロットされたシステム (2-DOF) | 説明 |
|---|---|---|---|
プラント | G | G | プラント応答。プラントのダイナミクスを調べるために使用します。 |
開ループ | GC | –GCy | 開ループのコントローラー プラント システムの応答。周波数領域設計に使用します。 設計仕様に、開ループのゲイン余裕および位相余裕など、ロバスト性の基準が含まれている場合に使用します。 |
設定値追従 | (r から y へ) | (r から y へ) | 設定点でのステップ変化に対する閉ループのシステム応答。設計仕様に設定点の追従が含まれている場合に使用します。 |
コントローラーの出力 | (r から u へ) | (r から u へ) | 設定点でのステップ変化に対する閉ループのコントローラー出力応答。設計が、コントローラーの飽和などの実際の制約で制限されている場合に使用します。 |
入力外乱の抑制 | (d1 から y へ) | (d1 から y へ) | 負荷外乱 (プラント入力でのステップ外乱) に対する閉ループのシステム応答。設計仕様に入力外乱の抑制が含まれている場合に使用します。 |
出力外乱の抑制 | (d2 から y へ) | (d2 から y へ) | プラント出力でのステップ外乱に対する閉ループのシステム応答。モデル化誤差に対する感度を解析する場合に使用します。 |
調整された応答とブロックの応答との比較
既定では、PID 調整器は次の両方を使用してシステム応答をプロットします。
Simulink® モデルのコントローラー ブロックにある PID 係数値 ([ブロックの応答])。
現在の PID 調整器設計の PID 係数値 ([調整された応答])。
現在の PID 調整器の設計をスライダーを動かすなどして調整すると、[調整された応答] のプロットは変化しますが、[ブロックの応答] のプロットは変化しません。

現在の PID 調整器の設計を Simulink モデルに書き込むには、 をクリックします。これを行うと、現在の [調整された応答] が [ブロックの応答] になります。現在の設計をさらに調整すると、新たな [調整された応答] のラインが作成されます。
をクリックします。これを行うと、現在の [調整された応答] が [ブロックの応答] になります。現在の設計をさらに調整すると、新たな [調整された応答] のラインが作成されます。
[ブロックの応答] を非表示にするには、 [オプション] をクリックし、[ブロックの応答を表示] をオフにします。
[オプション] をクリックし、[ブロックの応答を表示] をオフにします。
システム特性の数値の表示
以下のいずれかの方法で、ピーク応答、ゲイン余裕などのシステム特性の値を表示できます。
応答プロットで直接的に表示 — 右クリック メニューを使用して特性を追加すると、青色のマーカーが表示されます。次に、マーカーをクリックすると、対応するデータ パネルが表示されます。
[性能とロバスト性] テーブルで表示 — このテーブルを表示するには、
 [パラメーターの表示] をクリックします。
[パラメーターの表示] をクリックします。

プラントまたはコントローラーの MATLAB ワークスペースへのエクスポート
PID 調整器によって算出された線形化プラント モデルを MATLAB® ワークスペースにエクスポートし、さらに解析することができます。エクスポートするには、[ブロックの更新] をクリックし、[エクスポート] を選択します。

[エクスポート] ダイアログ ボックスで、エクスポートするモデルにチェックを付けます。[OK] をクリックして、プラントまたはコントローラーをそれぞれ状態空間 (ss) モデル オブジェクトまたは pid オブジェクトとして MATLAB ワークスペースにエクスポートします。
設計の改良
初期のコントローラー設計の応答が要件を満たしていない場合は、設計を対話形式で調整できます。PID 調整器には、コントローラー設計を改良するための 2 つの [領域] オプションがあります。
[時間](既定) — [応答時間] スライダーを使用して、制御システムの閉ループ応答を速めたり遅らせたりします。[過渡動作] スライダーは、コントローラーを外乱の抑制に対してよりアグレッシブにしたり、プラントの不確かさに対してよりロバストにするために使用します。[周波数]— [帯域幅] スライダーを使用して、制御システムの閉ループ応答を早めたり遅らせたりします (応答時間は 2/wc で、wc は帯域幅を表します)。[位相余裕] スライダーは、コントローラーを外乱の抑制に対してよりアグレッシブにしたり、プラントの不確かさに対してよりロバストにするために使用します。
いずれのモードにおいても、設定値追従と外乱の抑制の性能間にトレードオフが生じます。このトレードオフを調整するためのスライダーの使用方法を説明した例は、設定値追従と外乱の抑制のいずれかを優先するための PID コントローラーの調整を参照してください。
要件を満たす補償器設計が見つかったら、非線形 Simulink モデルで同じように動作することを確認します。詳細については、Simulink モデルでの PID 設計の検証を参照してください。
ヒント
スライダーを動かした後、初期のコントローラー設計に戻すには  [設計のリセット] をクリックします。
[設計のリセット] をクリックします。