周波数応答ベースの調整
周波数応答ベースの PID 調整器は、モデルをシミュレートして、制御帯域幅近傍のいくつかの周波数でのプラント周波数応答を推定します。その後、推定された周波数応答を使用して PID Controller のゲインを調整します。この調整器は、PID 調整器では調整に使用する操作点においてプラントを線形化できない場合に有用な代替方法です。
周波数応答ベースの PID 調整器は、連続時間と離散時間の両方で PID Controller ブロックおよび PID Controller (2DOF) ブロックの P、I、D、および N パラメーターを調整できます。PID Controller (2DOF) ブロックの場合、調整器は設定点の重み b と c を調整しません。
周波数応答ベースの PID 調整器の機能
対話型の PID 調整器と同様に、周波数応答ベースの PID 調整器は、PID Controller ブロックの出力と入力の間のループ内にあるプラントをすべてブロックと見なします。周波数応答ベースの PID 調整器は摂動実験を行ってプラントの開ループ周波数応答を推定します。そのために、調整器は以下の手順を実行します。
コントローラー出力でのフィードバック ループを中断し、プラントに摂動信号を適用してモデルをシミュレートします。摂動には周波数 [1/3,1,3,10]ωc での正弦波信号が含まれます。ωc は調整に指定するターゲット帯域幅です。プラントが漸近的に安定の場合、適用される信号にはステップ摂動も含まれます。
コントローラー入力での摂動への応答を測定します。
結果のデータを使用して、4 つの周波数でのプラントの周波数応答を推定します。漸近的に安定なプラントの場合、調整器はステップ摂動への応答も使用してプラントの DC ゲインを推定します。
推定周波数応答を使用して性能とロバスト性のバランスを取る PID ゲインを計算します。
モデルに外乱が含まれる場合、調整器はベースライン応答を取得するための摂動なしのシミュレーションと、プラントに摂動を適用するシミュレーションの、2 回のシミュレーションを実行できます。調整器はその後に 2 つの応答間の差異を使用して、モデル内の外乱の効果を取り除きます。この場合、調整に使用される推定周波数応答は、この外乱なしの応答に基づきます。
周波数応答ベースの PID 調整器を開く
周波数応答ベースの PID 調整器を開くには、PID Controller ブロックのダイアログ ボックスの [調整法の選択] ドロップダウン リストで、[周波数応答ベース] を選択します。

[調整] をクリックします。周波数応答ベースの PID 調整器が開きます。調整器は PID Controller ブロックからいくつかのパラメーターを読み取ります。これらのパラメーターには次のものが含まれます。
コントローラー タイプ (PI、PD、PID など)
コントローラー形式 (並列または理想)
コントローラーの時間領域 (連続または離散)
コントローラーのサンプル時間
周波数応答ベースの PID 調整器で、推定実験と調整目標のための設定を構成します。

実験設定の構成
[実験設定] セクションで、周波数応答の推定実験を制御するパラメーターを指定します。これらの設定の詳細については、[ヘルプ] をクリックしてください。
シミュレーションを 2 回実行する (既定) か、1 回実行するかを指定します。周波数応答の推定実験の結果に影響を与える可能性のある外乱がモデルに含まれている場合、[2 回のシミュレーション (外乱を除去)] を選択します。このオプションを選択すると、調整器はベースライン シミュレーションを実行し、結果の周波数応答を摂動されたシミュレーションから差し引いて、外乱の効果を取り除きます。モデルにそのような外乱が含まれない場合は [1 回のシミュレーション] を選択してベースライン シミュレーションをスキップします。
プラントが漸近的に安定か、または単一の積分器をもつかを指定します。プラントが漸近的に安定の場合、推定実験にプラントの DC ゲインの推定が含まれます。周波数応答ベースの PID 調整器はプラントにステップ信号を挿入することでこの推定を実行します。
注意
周波数応答ベースの PID 調整器は、不安定なプラントや、複数の積分器をもつプラントに使用しないでください。
実験の開始時間を [開始時間 (t0)] フィールドに指定します。実験はプラントが目的の平衡操作点にあるときに開始してください。たとえば、プラントがそのような操作点に達するにはシミュレーションを 10 秒間実行しなければならないことがわかっている場合、開始時間を 10 に指定します。
実験の持続時間を [持続時間 (tspan)] フィールドに指定します。周波数応答推定アルゴリズムが、調査するすべての周波数で良好な推定を得るのに十分なデータを収集できるまで、実験を実行し続けます。実験の持続時間の保守的な推定値は 100/ωc です。ここで ωc は、調整に指定したターゲット帯域幅です。
メモ
周波数応答ベースの PID 調整器は、[開始時間 (t0)] と [持続時間 (tspan)] をコントローラーのサンプル時間の最も近い倍数に切り上げます。
摂動の振幅を指定します。調整実験中、周波数応答ベースの PID 調整器はプラントに 4 つの周波数 [1/3,1,3,10]ωc で正弦波信号を挿入します。[正弦波振幅 (Asin)] フィールドを使用して、これらの挿入信号の振幅を指定します。各周波数で同じ振幅を挿入するにはスカラー値を指定し、それぞれ異なる振幅を指定するには長さが 4 のベクトルを指定します。
一般的なターゲット帯域幅をもつ一般的なプラントでは、実験周波数におけるプラント応答の大きさはあまり変化しません。このような場合、スカラー値を使ってすべての周波数で同じ大きさの摂動を与えることができます。ただし、応答が周波数範囲にわたり急激に減衰することがわかっている場合には、低周波数の入力の振幅を小さくし、高周波数の入力の振幅を大きくすることを検討してください。推定実験では、すべてのプラント応答が同等の大きさだと数値的にはよくなります。
摂動振幅は以下のとおりでなければなりません。
摂動がプラント アクチュエータのすべての不感帯を克服してノイズ レベルを超える応答を生成できる程度に大きい
定格操作点近傍のほぼ線形の領域内でプラントを実行し続け、プラントの入力または出力の飽和を回避できる程度に小さい
実験では正弦波信号が重ね合わされています (開ループ調整では、存在する場合はステップ摂動を含みます)。したがって、摂動は最小でもすべての振幅の和に等しい大きさをもちます。よって、振幅の適切な値を求めるには、次を考慮します。
アクチュエータの範囲。取り得る最大摂動がプラント アクチュエータの範囲内に必ず収まるようにします。アクチュエータが飽和状態になると、推定周波数応答に誤りが発生することがあります。
調整の定格操作点での与えられたアクチュエータ入力に対するプラント応答の変化量。たとえば、エンジン速度の制御に使用される PID コントローラーを調整すると仮定します。ターゲット帯域幅付近の周波数で、スロットル角度が 1° 変化するごとにエンジン速度が約 200 rpm 変わることがわかっています。さらに、線形性能を維持するため、速度は定格操作点から 100 rpm を超えて逸脱してはならないと仮定します。この場合、摂動信号が必ず 0.5 以下になるような振幅を選択します (ただし、値はアクチュエータ範囲内にあると仮定します)。
プラントが漸近的に安定の場合、ステップ摂動の振幅を [ステップ振幅 (Astep)] フィールドに指定します。ステップ摂動の選択に関する注意事項は、ステップ振幅を指定する場合と同じです。
設計目標の構成
ダイアログ ボックスの [設計仕様] セクションで、PID 調整の目標を指定します。
ターゲットの帯域幅を [ターゲットの帯域幅 (ラジアン/秒)] フィールドに指定します。ターゲットの帯域幅は、調整した開ループ応答 CP の 0 dB のゲイン交差周波数のターゲット値です。ここで P はプラントの応答、C はコントローラーの応答です。この交差周波数は制御帯域幅を大まかに設定します。目的の立ち上がり時間 τ に対し、ターゲット帯域幅の推定は 2/τ が適切です。
[ターゲットの位相余裕 (度)] フィールドに、交差周波数での調整した開ループ応答に対するターゲットの最小位相余裕を指定します。ターゲットの位相余裕は調整したシステムの目的のロバスト性を反映しています。通常は約 45° ~ 60° の範囲内の値を選択します。一般に、位相余裕が高いほどオーバーシュートは改善されますが、応答速度が制限される場合があります。既定値の 60° は、性能とロバスト性のバランスを取り、プラントの特性によってオーバーシュートは 5 ~ 10% になる傾向があります。
これらの設定の詳細については、[ヘルプ] をクリックしてください。
コントローラー ゲインの調整と検証
周波数応答の推定実験を開始するには [調整] をクリックします。推定実験の実行中、調整器は以下のことを行います。
開いている PID Controller ブロックを閉じる。
調整器のダイアログ ボックスに表示された以前の調整結果をすべてクリアする。
モデルの PID Controller ブロックを名前のないサブシステムに置き換える。
メモ
推定実験が完了するかキャンセルされると、調整器が PID Controller ブロックを復元します。このプロセスによってモデル キャンバス上で信号結線の配置が若干ずれることがあり、Simulink® モデルは未保存の変更がある状態になります。
推定実験が終了すると、調整器は新しい PID ゲインを計算してダイアログ ボックスの [調整結果] セクションに表示します (調整結果の詳細については、[ヘルプ] をクリックしてください)。
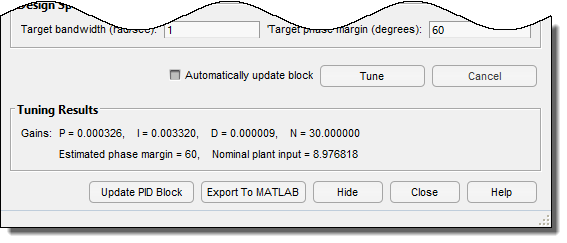
[ブロックの自動更新] が選択されている場合、周波数応答ベースの PID 調整器は調整が完了した時点で新しい PID ゲインを PID Controller ブロックに書き込みます。それ以外の場合は [PID ブロックの更新] をクリックして調整後のゲインをブロックに書き込みます。モデルをシミュレートして、完全な非線形システムに対して調整後のゲインを検証します。
周波数応答ベースの PID 調整器を使用して線形化されない Simulink モデル内の PID Controller ブロックを調整する例については、帯域幅近傍のプラントの周波数応答を使用した PID コントローラーの設計を参照してください。